
添加微信帮助解决机器人故障

 首页 > ABB机器人维修 >
首页 > ABB机器人维修 > 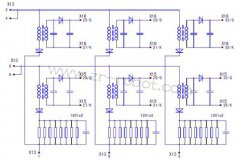
DCS400直流调速器的末级触发电路 电源/驱动板一般安装有6路触发脉冲电路,另外还预留有另6路末级触发脉冲电路,散热器上的模块安装孔也预留有6块晶闸管的安装位置,以实现调速器控制负载电机二象限或四象限运行(从软件到硬件)的可兼容性。 ... [全文]
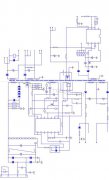
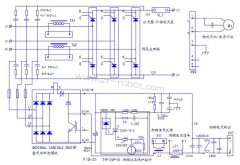
DCS400直流调速器开关电源电路 由X98端子进入的AC220V电源,经两只限流电阻引入桥式整流电路,又经CLC电路滤波后,作为开关电源的直流供电电源。开关电源电路一般包括以下几个回路: 1)振荡回路。由10只10k串联电阻、470电阻、稳压管构成电源起动电路,14脚 ... [全文]
ABB机器人DCS400线路板的电路原理 1、DCS400直流调速器电源/驱动板电路原理分析 DCS400直流调速器电源/驱动板包括电枢主电路、励磁输出电路、开关电源电路、末级触发电路等组成。 DCS400直流调速器电枢主电路、励磁主电路 电枢主电路为三相全控桥的典型结构 ... [全文]
机器人保养检查表 机器人本体: 检查动力电缆与通讯电缆。 检查各轴运动状况。 检查各轴密封。 检查机器人零位。 检查机器人标定数据。 检查机器人电池。(大于7.2V) 检查机器人各轴马达与刹车。 检查机器人各轴电缆。 机器人各轴加润滑油。 机器人控制柜: ... [全文]
ABB机器人系统备份及冷启动 系统备份及冷启动 系统备份 系统备份是指系统软件与应用软件的保存。 机器人的系统软件和应用软件均保存在软盘或机器人Ram1disk上,软盘并不适于长时间保存数据,机器人的某些故障会导致Ram1disk上数据丢失。 系统和应用软件的不 ... [全文]
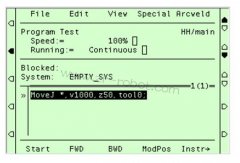
ABB机器人维修程序指令运行 测试 1. 手动减速状态/编程窗口/File/Check Program 检查程序语法 2. 编程窗口/Test 切换至程序测试窗口 Start 启动程序,机器人按程序指令运行。 FWD 机器人按程序指令顺序向前运行一个指令。 通过程序指针与光标确定当前指令行 ... [全文]
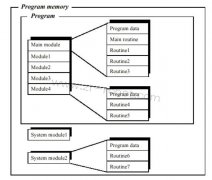
编程与测试 1、程序的组成: 应用程序是由三个不同部分组成: 1. 一个主程序。 2. 几个子程序(例行程序)。 3. 程序数据。 除此之外,程序储存器还包括系统模块。USER模块与BASE模块在机器人冷启动后自动生成。 编程窗口: 1. File Open 打开一个现有文件。 ... [全文]

自动生产 开机上电,将操作模式选择器置于减速手动模式。 调入程序 RAPID语言所编写的简单程序都是由三个最基本的部分组成。 Program: 程序。 Main routine: 主程序,主程序必不可少并总是程序执行的起点。 Subroutine: 子程序。 Program data: 程序中所使 ... [全文]
合上电源 合上电源前,要检查确认无人处于机器人周围的防护区内。 合上主电源开关 系统自动检查机器人硬件,当检查完成且无故障被检测到,系统将在示校器上显示如下信息 在自动模式下,生产窗口将在几秒钟后出现。 机器人通常以上次电源关闭时相同的状态启动 ... [全文]
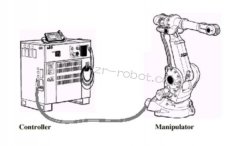
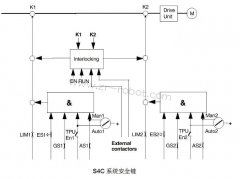
S4C系统介绍: 常规型号: IRB 1400,IRB 2400,IRB 4400,IRB 6400 IRB 指 ABB 机 器 人, 第一位数(1,2,4,6)指机器人大小 第二位数( 4 )指机器人属于S4或S4C系统。 无论何型号,机器人控制部分基本相同。 IRB 1400:承载较小,最大承载为5kg,常用于焊接。 ... [全文]


