简介:合上电源 合上电源前,要检查确认无人处于机器人周围的防护区内。 合上主电源开关 系统自动检查机器人硬件,当检查完成且无故障被检测到,系统将在示校器上显示如下信息 在自动模式下,生产窗口将在几秒钟后出现。 机器人通常以上次电源关闭时相同的状态启动……
合上电源
合上电源前,要检查确认无人处于机器人周围的防护区内。
合上主电源开关
系统自动检查机器人硬件,当检查完成且无故障被检测到,系统将在示校器上显示如下信息
在自动模式下,生产窗口将在几秒钟后出现。
机器人通常以上次电源关闭时相同的状态启动。程序指针保持不变;全部数字输出都置为断电以前的值,或者置为系统参数中指定的值。当开机后程序重新启动时,是正常的开关机:
机器人慢慢地回到编程路径(有偏差),然后在程序的路径上继续。
运动设定和数据自动被设定到断电前相同的值。
机器人将继续对中断作出反应。
在断电前激活的机械单元将在程序开始后自动被激活。
弧焊和点焊过程自动被重置。但是,如果程序正好执行到焊接数据有变化时,新数据将在接缝上过早被激活。
限制:
全部文件和串行通道都被关闭(可由用户程序控制)。
全部模拟输出都被置为0,软饲服置为缺省值上(可由用户程序控制)。
焊缝跟踪不能被重置。
独立的轴不能被重置。
如果在中断例行程序或错误处理程序执行时发生断电,程序路径不可能重新开始。
如果在中央处理器非常忙的时候发生断电,有可能由于系统无法正常关机而导致无法重新启动。机器人在这种情况下将告诉用户重新开始不可能。
启动时的故障
机器人启动时将对机器人功能进行广泛的检查。如果发生错误,会在示教器上以一般文本信息格式进行报告,并在机器人的事件记录中进行记录。 欲了解详细信息,请参阅产品手册。
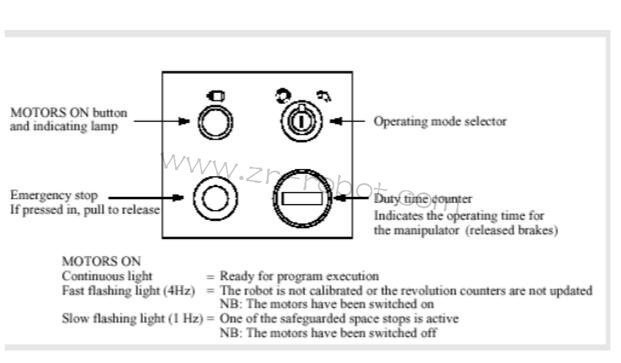
操作面板
下图为操作面板的功能描述
MOTORS ON 指示灯状态:
持续亮: 程序待命状态。
快速闪烁(4Hz): 机器人不同步,电机已上电。
慢速闪烁(1Hz): 运行链断开,电机未上电。
紧急制动及紧急制动的复位
当急停键有效后,电机电源被迅速切断而停止程序运行。 排除引起急停的因素后,复位急停键并重新按下MOTORS ON即可恢复系统。
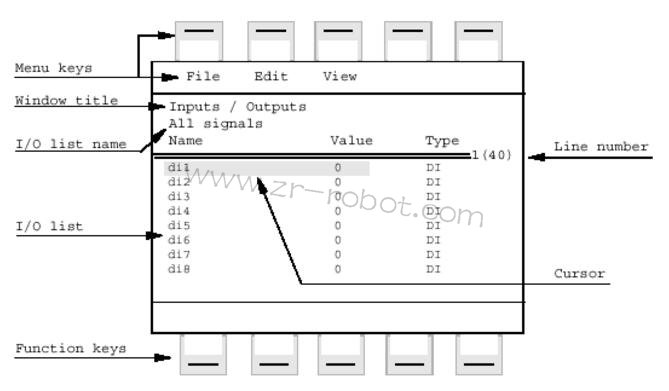
用窗口进行工作
在本章中我们学习如何打开一个窗口并使用它,如下图,以INPUT/OUTPUT(输入/输出窗口)为例进行说明。按键进入 INPUT/OUTPUT(输入/输出窗口)
输入/输出窗口中I/O列表的显示取决于系统中信号的定义及系统中有多少I/O板。
通过导航键或编辑键可以选择I/O信号。按回车键可查询该信号的连接及设置信息
选择输出信号时可用功能键改变输出状态。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB机器人维修 >
首页 > ABB机器人维修 >