简介:机器人保养检查表 机器人本体: 检查动力电缆与通讯电缆。 检查各轴运动状况。 检查各轴密封。 检查机器人零位。 检查机器人标定数据。 检查机器人电池。(大于7.2V) 检查机器人各轴马达与刹车。 检查机器人各轴电缆。 机器人各轴加润滑油。 机器人控制柜:……
机器人本体:
检查动力电缆与通讯电缆。
检查各轴运动状况。
检查各轴密封。
检查机器人零位。
检查机器人标定数据。
检查机器人电池。(大于7.2V)
检查机器人各轴马达与刹车。
检查机器人各轴电缆。
机器人各轴加润滑油。
机器人控制柜:
检测控制柜温度。
检查主机板、存储板、计算板以及驱动板。
检查程序存储电池。(大于3.6V)
检查变压器以及保险丝。
检查机器人三相电源。
检查I/O板以及保险丝。
检查安全链。
检测示教板操作。
检查电扇及空调。
检测软盘读取口。
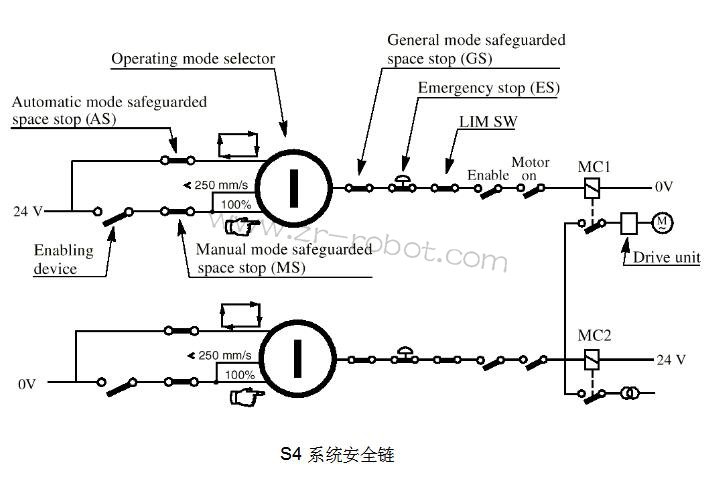
安全控制链
一、操作安全控制链
安全链是由机器人计算机控制电机上电的双回路。
在电机上电前,每一条回路的所有开关都必须闭合。
安全链中任何一个继电器断开,系统都将断开电机供电并吸合电机抱闸。
控制面板上的指示灯和示教器的I/O窗口均可显示上电状态。
定义工具中心点(TCP)
一、工具中心点(Tool Center Point)
机器人移动是通过工具坐标系同工件坐标系通过矩阵计算来确定。所以 TCP是机器人非常重要的一个环节。
TCP 在以下场合需要重新定义
1. 工具重新安装。
2. 更换工具。
3. 工具使用后出现运动误差。
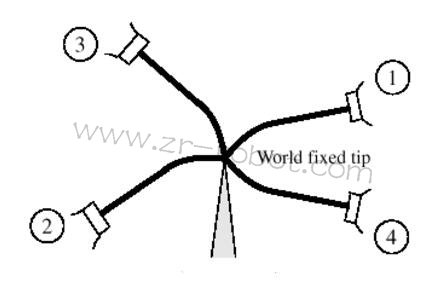
二、定义TCP方法:
1. 首先在机器人工作范围找一个非常精确的固定点作参考点。
2. 再在工具上找一个参考点(最好在工具中心)。
3. 操纵工具上的参考点以最少四种不同的姿态尽可能接近固定参考。
4. 机器人通过四组解的计算, 得出TCP坐标。
4点法:不改变坐标方向,只转换坐标系位置。
5点法:第五点运动方向为Z轴方向。
6点法:第五点运动方向为X轴方向。
第六点运动方向为Z轴方向。
一般情况下,最好使用六点法定义。
为了操作方便,第四点最好垂直定义。
TCP一般定义在USER模块中,使所有程序共享。
三、定义TCP步骤:
1. 编程窗口/File/New或Open
2. /VIEW/Modules/USER/回车
3. /VIEW/Datatype/tooldate/回车
4. /New/回车/输入工具名/OK/回车
5. /mass(定义工具重量,Kg。只包括工具重量,不包括工件重量)/OK
6. /Special/Define Coord...../回车
7. /切换键/选择定义方法(6Point)/OK
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB机器人维修 >
首页 > ABB机器人维修 >