简介:进入拆卸环节前,先要关注的是拆卸电机前的注意事项。对于IRB2400和IRB1410型号的机器人,当涉及到2轴和3轴的拆卸时,操作人员必须首先手动释放电机刹车,确保2轴和3轴能够完全压下到死限位。这一步至关重要,它能有效防止在电机拔出过程中,由于2轴和3轴失去……
在准备工具方面,需要确保拥有以下物品:一个24V/100W的开关电源及其相应的连接出线,一副梅花内六角扳手,一把斜口钳,以及其他可能用到的辅助工具。
进入拆卸环节前,先要关注的是拆卸电机前的注意事项。对于IRB2400和IRB1410型号的机器人,当涉及到2轴和3轴的拆卸时,操作人员必须首先手动释放电机刹车,确保2轴和3轴能够完全压下到死限位。这一步至关重要,它能有效防止在电机拔出过程中,由于2轴和3轴失去刹车而突然掉落,从而可能对操作人员造成伤害。此外,整个拆卸电机的过程都必须在断电的状态下进行,以确保操作的安全性。
在六个轴电机的拆卸小结中,需要注意以下几点:
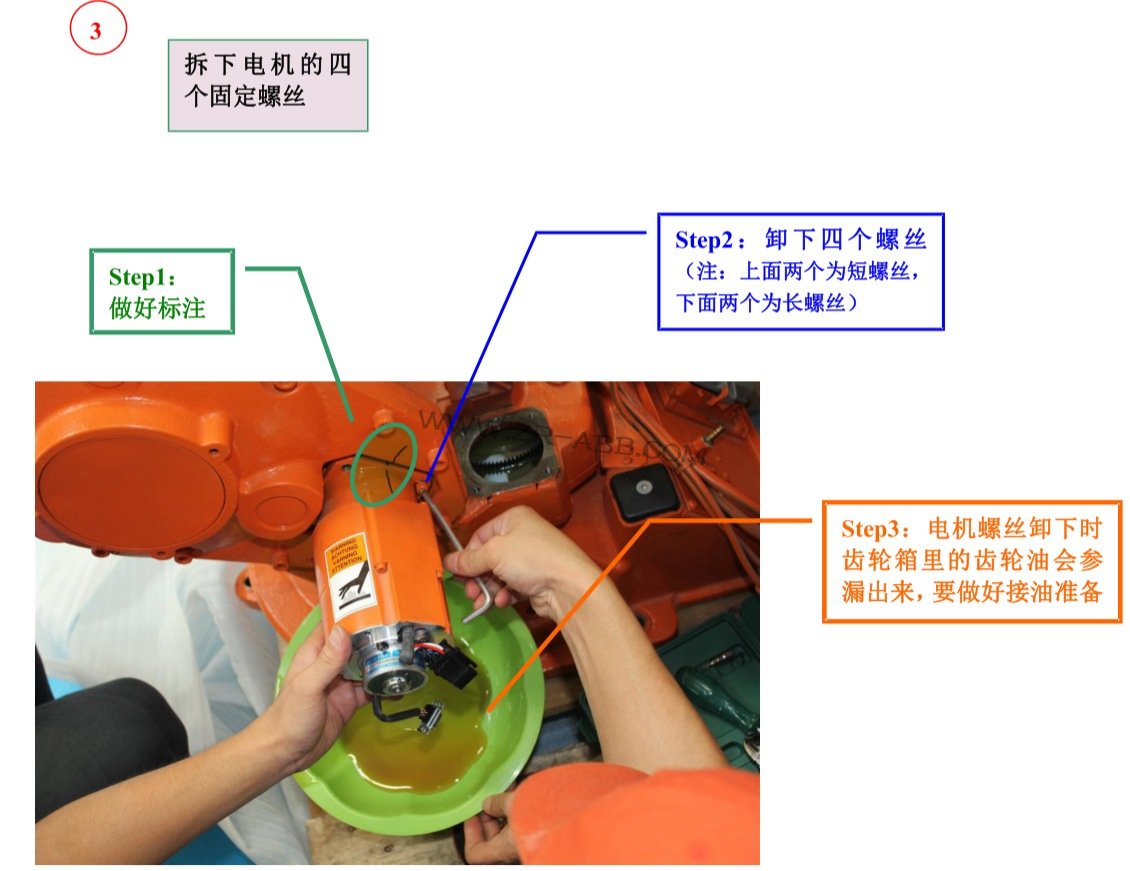
- 1轴至3轴的齿轮箱内都含有大约5L的齿轮油,
- 在拆卸马达时,需要提前准备好容器,以便在电机拔出时能够接住流出的齿轮油;
- 2轴和3轴的电机与4轴、5轴、6轴的电机属于同一种型号,在多个电机同时拆卸的情况下,需要特别注意分辨各个轴,以避免混淆。
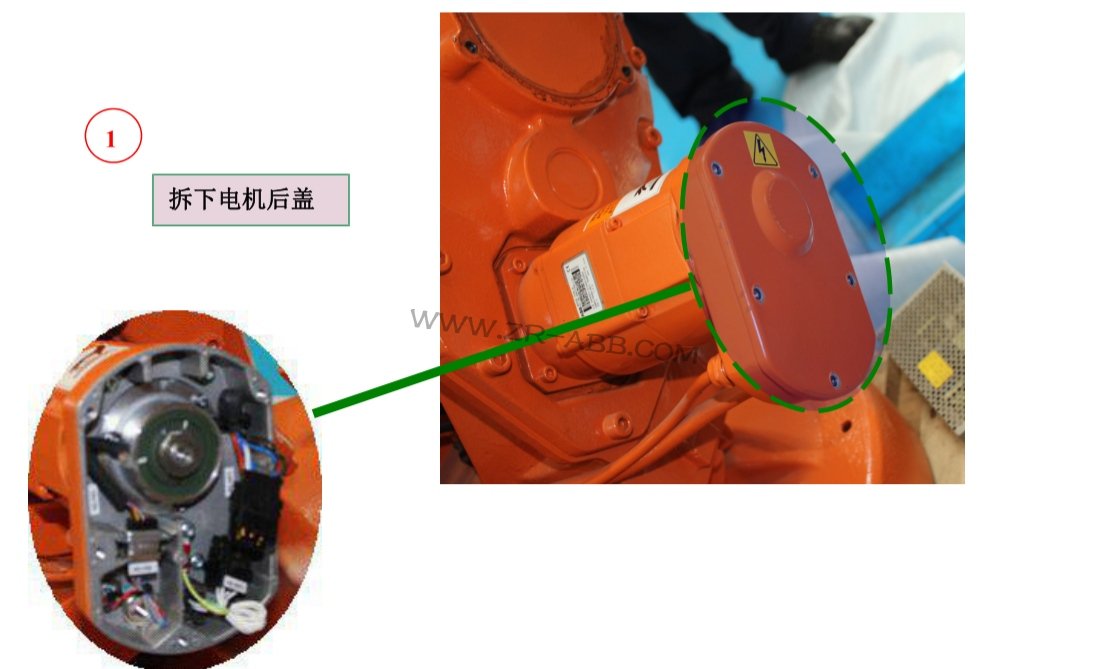
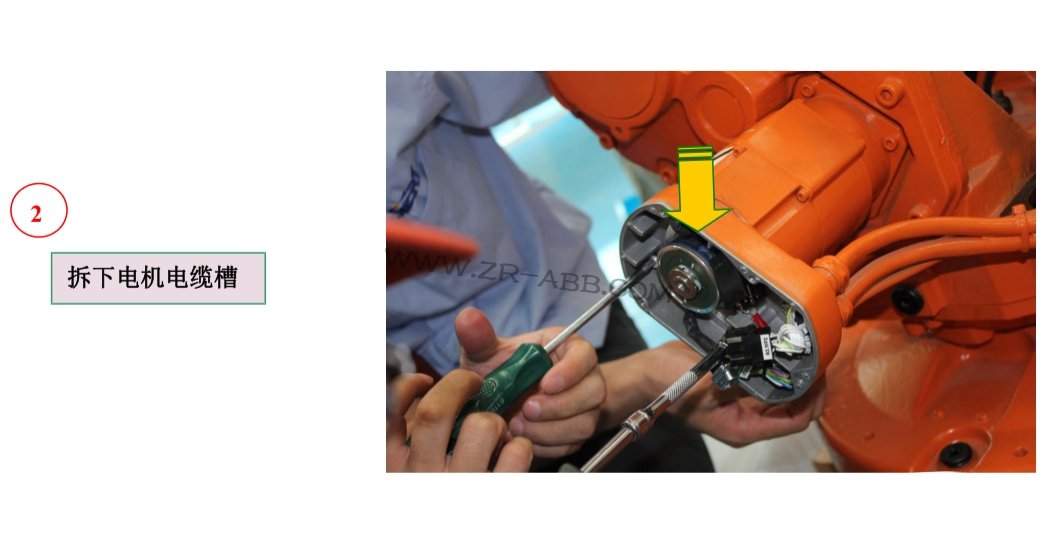
接下来,以ABB机器人手臂维修2轴电机的拆卸步骤为例进行说明(具体步骤如图所示)。
在安装环节,2轴电机的安装方法需要按照拆卸时的逆步骤进行。
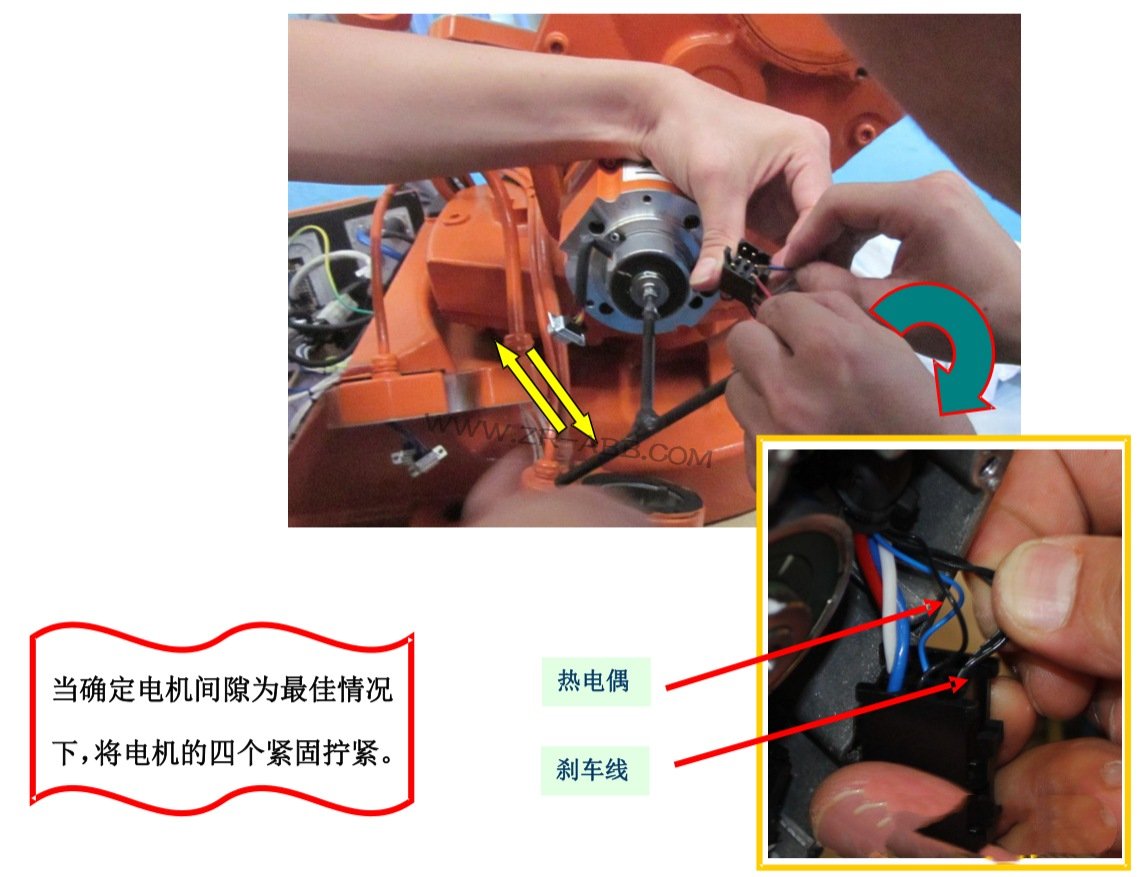
- 将电机按照原来的方向插入到齿轮箱中,并将四个紧固螺丝轻轻旋上,但不要立即拧紧,以便后续调整电机输出齿轮与齿轮箱齿轮之间的配合间隙。
- 调整间隙时,可以使用自制的“起子”工具,将其锁在电机转轴编码器端上。
- 使用24V直流开关电源连接到电机的刹车两根线上,释放刹车。在确认刹车已经打开后,可以手动来回微动自制工具“起子”,通过手感来判断并调整所需的间隙大小(注意用力不要过大,以免带动齿轮箱转动)。
- 调整好间隙后,将电机锁紧,并按照拆装的反步骤将电机的电缆槽、电缆以及电机盖安装上。
ABB机器人手臂维修电机安装完毕后,需要进行上电试运行,确认无误后,对2轴齿轮箱重新注入齿轮油(注油时需要耐心等待,可以自制一个注油工具,确保注油时内部气体能够顺畅排出)。其他轴的安装步骤与2轴相同。
最后,需要特别注意的是,在电机安装完毕后,建议不要进行微校操作,因为这样做可能会导致TCP精度无法得到保证。
以上就是ABB机器人手臂维修时电机拆装的详细步骤。为确保伺服电机的正常运行,我们建议定期进行预防性的维护和检查工作。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB机器人维修 >
首页 > ABB机器人维修 >