
添加微信帮助解决机器人故障

 首页 > ABB机器人维修 >
首页 > ABB机器人维修 > 
ABB机器人关节维修案例故障描述:一台ABB IRB 6640机器人在执行焊接任务时,突然出现关节运动不灵活的情况。具体表现为机器人的第3轴在运动过程中出现卡滞现象,导致焊接路径偏离预设轨迹,影响了生产质量。 ... [全文]

经过一系列的排查工作,我们发现控制柜内的驱动接线插头以及机器人本体到控制柜的动力线针脚均处于正常状态。在拔下一轴电机的动力接头后,我们发现1600一轴电机的转接线接头已经损坏,且电机接头出现了烧融的现象。 ... [全文]

当遇到ABB机器人故障时,可以通过以下方法快速判断是硬件还是软件问题: 硬件问题的判断方法 检查连接线缆: 检查控制柜到机器人之间的动力线和编码器线有无松动、破损、烫伤等情况。 检查机器人上的中继器线是否破损。 ... [全文]

以下是一些ABB机器人中空轴维修的案例参考: 案例一:ABB机器人中空轴磨损维修 故障现象:机器人在运行过程中,中空轴出现磨损,导致机器人运动精度下降,影响生产质量。 ... [全文]
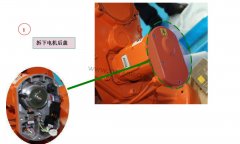
进入拆卸环节前,先要关注的是拆卸电机前的注意事项。对于IRB2400和IRB1410型号的机器人,当涉及到2轴和3轴的拆卸时,操作人员必须首先手动释放电机刹车,确保2轴和3轴能够完全压下到死限位。这一步至关重要,它能有效防止在电机拔出过程中,由于2轴和3轴失去 ... [全文]

在进行ABB机器人节气装置维修时,以下是一些常见的错误操作: 未断电操作:在进行ABB机器人维修之前,没有切断机器人的电源,这可能会导致电击或其他安全事故。 未使用适当的工具:使用不适合的工具进行维修,可能会损坏机器人的部件或导致维修不彻底。 ... [全文]

ABB机器人减速机故障常见的主要包括以下几类: 漏油 :这是机器人减速机维修中最常见的故障之一,主要原因包括减速机内外压力差过大、透气孔堵塞、加油量过多等。漏油的形式主要有齿轮减速机出力漏油、减速电机入力漏油和减速机油孔漏油。 ... [全文]

观察机器人关节运动时是否有异常声音,例如关节运动时发出刺耳的摩擦声或撞击声,可能是由于齿轮磨损、轴承损坏等原因导致的。 ... [全文]

当ABB机器人在其运转过程中出现了反常的声音或是颤动现象时,我们首先需要认识到,这可能源于伺服配线的故障、伺服参数的不合理设置,或是机械体系自身的问题。以下是一套详尽的处理流程,旨在帮助你应对这一挑战: ... [全文]

ABB机器人减速机常见的故障主要包括以下几类: ... [全文]

在ABB IRB2600机器人维修制动器电源出现异常时,先检查制动垫的磨损情况。通过测量制动垫的剩余厚度,可以判断其是否需要更换。同时,电磁抱闸的吸合情况也不容忽视。使用万用表对电磁抱闸的电阻值和电源电压进行测量,以确认其是否在正常范围内。此外,还需 ... [全文]

ABB机器人维修案例总结,包括故障报警和修复方法: ... [全文]


