
添加微信帮助解决机器人故障

 首页 > ABB机器人维修 > ABB机器人保养 >
首页 > ABB机器人维修 > ABB机器人保养 > 
ABB机器人保养示教器清洁 工业机器人保养应从实际需要出发按适当的频度清洁机器人示教器; 尽管面板漆膜能耐受大部分溶剂的腐蚀,但仍应避免接触丙酮等强溶剂; 若有条件,ABB机器人示教器不适用时应拆下并放置在干净的场所。 ABB机器人保养清洗控制器内部 ... [全文]
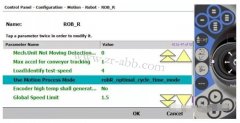
相对于ABB机器人运动过程模式,以下模式 Cycle Time要慢 X %: Accuracy Mode: 0% - 15% Low Speed Accuracy Mode: 1% - 30% Low Speed Stiff Mode: 2% - 100% 机器人品牌: ABB 软件版本: RW 6.0及以上 配置参数:MOTION_PROCESS_MODE 参数地址:控制面板- ... [全文]

一、旋转关节 本节描述如何上紧机械手或控制器上的旋转接头这些旋转部位的说明和扭矩值只适用于金属部件,不适用于软的易碎的材料 该说明只适用于标准的旋转接头 UNBRAKOUNBRAKO是一种由ABB推荐的特殊的螺钉,表面经过特殊处理,很耐用 在用到这种螺钉的地方 ... [全文]

一、IRB5400机器人本体保养: 1.检查ABB机器人IRB5400动力电缆与通讯电缆。 2.检查ABB机器人IRB5400各轴运动状况。 3.检查ABB机器人各轴密封。 4.IRB5400机器人本体保养,检查机器人零位。 5.检查机器人标定数据。 6.检查机器人电池。(大于7. 2V) 7.检查ABB ... [全文]

ABB机器人IRB4600的故障问题 1:无LED灯指示:或熄灭,系统无法正常启动。 2:控制器死机:机器控制器完全或者间歇的死机,无指示灯亮起且不能操作:原因:主保险丝可能已断开,控制器之间的连接缺失,控制器未连接电源,变压器出线故障或未连接。 3:控制器 ... [全文]

点焊机应用广泛,但点焊机有时候也会出现故障,而使用户不能正常生产。影响用户的生产进度,下面介绍一下焊机常规的故障维修和保养,让用户在第一时间能解决故障,为高效的生产提供便利!. 1、点焊机踏下脚踏板焊机不工作,电源指示灯不亮: (1)查抄电源电压 ... [全文]

ABB机械手IRB 4400机身紧凑、动作迅捷的通用工业机器人 IRB 4400工业机器人机身紧凑、运行速度极快,适用于大中型重物搬运。其独有的多功能设计广泛适应各种制造业需求。该型机器人在高速运行状态下的荷重能力达60 kg ,通常一次可搬运两件物料。此外,该机 ... [全文]

1. ABB机器人Pdisp 轨迹偏移使用 1)如果有下图两个产品,已经完成了右边产品轨迹,左边产品估计一样,如何快速生成左边轨迹(左边产品可能有平移和旋转) 2)完成右边轨迹示教Path_30,如上图。起点为Target_20。 3)完成左边起点的示教,为Target_ref_star ... [全文]

ABB机器人IRB 1520ID高精度弧焊机器人 ABB新型机器人IRB 1520ID是一款高精度中空臂弧焊机器人 (集成配套型),能够实现连续不间断地生产,可节省高达50%的维护成本,与同类产品相比,焊接单位成本最低。 ABB机器人IRB 1520ID即可在数小时内完成安装进行使用 ... [全文]

ABB机器人IRB 1600ID采用集成式配套设计,所有电缆和软管均内嵌于机器人上臂,是弧焊应用的理想选择。该款机器人线缆包供应弧焊所需的全部介质,包括电源、焊丝、保护气和压缩空气。 提高电缆寿命预测精确度 机器人背负的线缆发生故障是生产线意外停产的常见 ... [全文]

广州子锐机器人技术有限公司服务项目:对所有型号的机器人搬迁,工业机器人迁厂,机器人迁移,ABB机器人维修,ABB机器人保养,安川机器人维修,安川机器人保养之外,还维修保养库卡机器人和发那科机器人。 1、机器人搬迁、卸装、安装、调试。 2、专业提供ABB ... [全文]
1. ABB机器人中用来表示位置的数据类型是: Robtarget 用于定义移动机械臂和附加轴的移动指令中的位置。 jointtarget 用于确定通过指令MoveAbsJ 而将机械臂和外轴移动到的位置。 2. ABB 机器人中用来表示速度的数据类型是: Speeddata 用于规定机械臂和外轴 ... [全文]


