МђНщЃКABB S4CplusЛњЦїШЫгВМўЯЕЭГМАГЃМћЙЪеЯЗжЮі.ЗжЮіИУЛњЦїШЫдкЙЄзїЪБЕФЕфаЭЙЪеЯМАВњЩњдШІ.ВЂЬсГіХХГ§ЙЪеЯЕФЗНЗЈЁЃХХГ§гВМўЙЪеЯКѓдйМьВщЯЕЭГШэМў.ШЋЗНУцХХГ§ЛњЦїШЫЙЪеЯЃЌетбљОЭЛсДѓДѓЫѕЖЬЙЪеЯХХГ§ЕФЪБМф.ЮЊЩњВњЯпЕФе§ГЃЩњВњЬсЙЉБЃеЯЁЃ 1ЁЂABB S4CplusЛњЦїШЫгВМўЁЁ
ЁЁЁЁ
ABB S4CplusЛњЦїШЫгВМўЯЕЭГМАГЃМћЙЪеЯЗжЮі.ЗжЮіИУЛњЦїШЫдкЙЄзїЪБЕФЕфаЭЙЪеЯМАВњЩњдШІ.ВЂЬсГіХХГ§ЙЪеЯЕФЗНЗЈЁЃХХГ§гВМўЙЪеЯКѓдйМьВщЯЕЭГШэМў.ШЋЗНУцХХГ§ЛњЦїШЫЙЪеЯЃЌетбљОЭЛсДѓДѓЫѕЖЬЙЪеЯХХГ§ЕФЪБМф.ЮЊЩњВњЯпЕФе§ГЃЩњВњЬсЙЉБЃеЯЁЃ
ЁЁЁЁ1ЁЂABB S4CplusЛњЦїШЫгВМўЯЕЭГ
ЁЁЁЁ1.ЛњЦїШЫБОЬхЁЃЛњЦїШЫБОЬхЪЧгЩСљИізЊжсзщГЩЕФЛњЙЙЃЌУПИізЊжсЖМДјгавЛИіЮїУХзгЩњВњЕФНЛСїЫХЗўЕчЛњЁЃЭЌЪБЕчЛњздДјЕФБрТыЦїЗДРЁаХКХИјЧ§ЖЏЦї.Ч§ЖЏЦїИљОнЗДРЁжЕгыФПБъжЕНјааБШНЯ.ЕїећзЊЖЏЕФНЧЖШЃЌЛњЦїШЫдЫЖЏОЋЖШДяЕН±0.05mm—±0.2mmЁЃБрТыЦїгыДЎПкВтСПАх(SMBчіНгЃЌУПИіНЛСїЫХЗўЕчЛњЖМгаЕЅЖРЕФЙЉЕчКЭБрТыЦїВрСПЯпТЗЁЃДЎПкВтСПАхжївЊЦ№НгЪеСљИіжсБрТыЦїЮЛжУВЮЪ§ЕФзїгУЁЃВЂЭЈЙ§ДЎПкВрСПАхгыПижЦЙёМЦЫуЛњЯЕЭГЭЈаХ.ЕїећЛњЦїШЫдЫааЁЃ
ЁЁЁЁ1.2ПижЦОмзщГЩЃЌ
ABBЧ§ЖЏФЃПщЮЌаоЃЌЛњЦїШЫПижЦЙёгЩЛњЦїШЫжБСїЙЉЕчЯЕЭГ.ЪфШыЪфГіЯЕЭГ.АВШЋЯЕЭГ.МЦЫуЛњПижЦЯЕЭГЃЌЫХЗўЧ§ЖЏЯЕЭГЕШ.ЩЂШШРфШДЯЕЭГзщГЩ
ЁЁЁЁ1.21ЛњЦїШЫжБСїЙЉЕчЯЕЭГЁЃЛњЦїШЫжБСїЙЉЕчЕЅдЊвЛDSQC506НЋЪфШЫ220VНЛСїЕчзЊЛЛЮЊЪфГі24V, 15VжБСїЕчЃЌЮЊЛњЦїШЫЧ§ЖЏЯЕЭГL/OАхЕЅдЊЃЌАВШЋАхЁЂДЎПкВтСПАхЕШЩшБИЙЉЕч;МЦЫуЛњжБСїЙЉЕчЕЅдЊDSQCSOSНЋ24VжБСїЕчзЊЛЛЮЊЯргІ5V,33V,12VжБСїЕч.ЮЊЛњЦїШЫФкВПМЦЫуЛњЯЕЭГЬсЙЉЕчдДЁЃжїМЦЫуЛњЭЈЙ§ЯЕЭГМрПизмЯпSMBus.МрПиЫљгажБСїЪфГі;ЕчГизщЕЅдЊ_DSQC508гЩПижЦПЈ.ЕчГизщ.ВтСПЕчзшШ§ВПЗжзщГЩЁЃПижЦПЈЪЧЕчГиЮЂДІРэЙмРэАхЁЃ
ЁЁЁЁЕчГизщЪЧгЩДјЮТЖШДЋИаЦїЕФПЩГфЕчЯтИёЕчЫћзщГЩЪфШы24VжБСї.ЪфГі21.6VжБСї.ЕБЛњЦїШЫЙиЙиЛњЪфШыНЛСїЕчбЙаЁгк180VЪБ.ВЂГЌЙ§20m.ЃЌЕчГизщПЊЪМЗХЕч.ЮЊЛњЦїШЫЯЕЭГБИЗнЬсЙЉЕчСІЁЃЛњЦїШЫЭЈЙ§ЮТЖШМьВтПижЦГфЕчзДСЕ.ВЂУПжмвЛДЮЭЈЙ§ВрЪдЕчзшЗХЕчздМьЕчГизДЬЌЁЃжїМЦЫуЛњЭЈЙ§ЯЕЭГМрПизмЯпМрПиЕчГизщЕчСІЁЂГфЕчзДСЕЁЂЕчГиЙІФмгыЕчГизДЬЌ
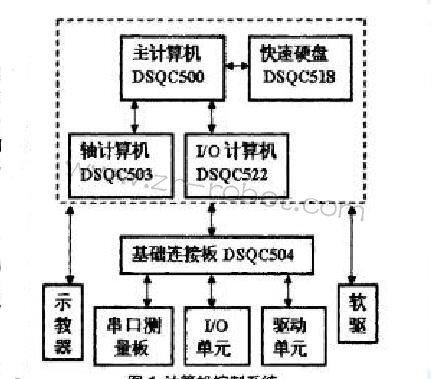
ЁЁЁЁ1.22МЦЫуЛњПижЦЯЕЭГЁЃЛњЦїШЫМЦЫуЛњЯЕЭГШчЭМЫљЪО.гЩжїМЦЫуЛњАхDSQC500.жсЪВЫуЛњАхDSQC503.L/OМЦЫуЛњАхDSQC522.ЕзАхDSQC501.ПьЫйгВХЬDSQC518.МЦЫуЛњжБСїЙЉЕчЕЅдЊDSQC505ЁЂЕчГизщЕЅдЊDSQC5O8.РфШДЗчЩШЕШзщГЩЁЃжїМЦЫуЛњ.жсМЦЫуЛњ..L/OМЦЫуЛњЭЈЙ§ЕзАхСЌНг.ПьЫйгВХЬАВзАдкжїМЦЫуЛњАхЩЯЁЃМЦЫуЛњЯЕЭГжЇГж1-2Пщ1/0МЦЫуЛњАхКЭ1-3ПщжсМЦЫуЛњАхЁЃУППщжсМЦЫуЛњАхзюЖрПижЦ7ИіжсЕїећИїжсЕФЫйТЪКЭзЊОиЃЌжсМЦЫуЛњДгжїМЦЫуЛњНгЪеЪ§Он.ДгДЎПкВтСПАхНгЪеЕБЧАЮЛжУаХКХЃЌМЦЫуЛњЪЙгУетаЉЪ§ОнМЦЫуЕїећКѓгфГіЮЛжУаХКХжСЧ§ЖЏЯЕЭГЁЃЕБМЦЫуЛњЯЕЭГЙЄзїЪБЭЈЙ§ЭтВПЛљДЁСЌНгАхDSQC504гыЧ§ЖЏЯЕЭГЭЈаХ.ЪфГідЫгУжИСюЃЌЧ§ЖЏЧ§ЖЏЦїдЫаа.ВЂНгЪеДЎПкВтСПАхЗДРЁаХКХ.МЦЫуЛњЦїШЫдЫЖЏЮЛжУЃЌ.ВЂЗЂГіЯТвЛжИСюЁЃ1.23ЫХЗўЧ§ЖЏЯЕЭГЃЌЫХЗўЧ§ЖЏЯЕЭГгЩМЦЫуЛњЯЕЭГПижЦЃЌЖдЮЛжУЁЂЫйЖШКЭЕчЛњЕчСїНјааЪ§зжЛЏЕїећЁЃЖдЕчЛњЕФНЛСїПижЦНјааЫОВНЁЃЛњЦїШЫЭЈЙ§МЦЫуЛњЯЕЭГЗЂГідЫЖЏжИСюЃЌПижЦЧ§ЖЏЦїЪЙЛњЦїШЫдЫЖЏЃЌВЂДгДЎПкВтСПАхСЌајЕиНгЪеЛњЦїЦїШЫаТЕФЮЛжУЪ§ОнЁЃЪфШыЮЛжУЕїећЦїжаЃЌгыЯШЧАЕФЮЛжУЪ§ОнНјааБШНЯКЭЗХДѓЃЌЪфГіаТЕФЮЛжУКЭЫйЖШПижЦВЮЪ§ЁЃЭЌЪБЯЕЭГЛсИљОнжиСІЁЂдЫЖЏЪБЕФзЊЖЏЙпСПКЭжсжЎЫХЕФЯрЛЅзїгУЃЌВЛЖЯЕиМЦЫуКЭгХЛЏЕїећВЮЪ§ЁЃABBЧ§ЖЏФЃПщЮЌаоЃЌЧ§ЖЏЕЅдЊгЩЧ§ЖЏЙЉЕчЕЅЁВDC. LINK)КЭШ§ИіЧ§ЖЏЦїзщГЩЁЃУПИіЧ§ЖЏЦїПижЦ2ИіжсЕФНЛСїЫХЗўЕчЛњ:1ЁЂ6жсЃЌ2ЁЂ4жсЃЌ3ЁЂ5жсИїЙВгУвЛИіЧ§ЖЏЦїЁЃ
ЁЁЁЁ1.24АВШЋЯЕЭГЃЌЛњЦїШЫАВШЋЯЕЭГЪЧЛљгкАВШЋПижЦЕФЫЋЕчзгАВШЋСДЁЃУПвЛЬѕЕчзгАВШЋСДЖМЪЧгЩШєИЩИіПЊЙиДЎСЊзщГЩЕФдЫааСДЃЌЛњЦїШЫжЛгадкЫљгаПЊЙиЖМБеКЯЕФЧщПіЯТЃЌВХФмЪЙЛњЦїШЫЩшжУMOTOR ONФЃЪНЃЌЛњЦїШЫжЛгадкMOTORONзДЬЌЯТВХФмИјЫХЗўЕчЛњЩЯЕчЁЃШчЙћАВШЋСДвЛЕЉЖЯПЊЃЌЛњЦїШЫОЭзЊЛЛГЩMOTOR OFFФЃЪН.ЛњЦїШЫКЮЗўЕчЛњЕєЕч.жЛгаИДЮЛЭЃжЙаХКХЛњЦїШЫВХФмдйДЮЩЯЕчЁЃАВШЋУцАхDSQC509ЕФжївЊЙІФмЪЧМрПиЫЋЕчзгАВШЋСД.ИїПЊЙизДЬЌЖМЯдЪОдкАВШЋУцАхDSQCSO9ЕФLEDжИЪОЕЦКЭЪОНЬЦїЕФЯдЪОЦїЩЯЃЌЙлВьетаЉзДЬЌОЭПЩвдХаЖЯГіЭЃжЙаХКХЕФРДдДЁЃПижЦУцАхЛЙМрПиЫХЗўЕчЛњЙ§ШШБЃЛЄPTCЮТПиЕчзшКЭБфбЙЦїЙ§ШШБЃЛЄЃЌЧ§ЖЏЦїЕЅдЊЕФРфШДЗчЩШКЭЗтЫуЛњЯЕЭГЕФРфШДЗчЩШЃЌжЛвЊетаЉзАжУгааХКХ.гфШы.ЕчзгАВШЋСДСЂМДЖЯПЊ,ЛњЦїШЫЭЃжЙдЫааЁЃ1.25гфШыЪфГіЯЕЭГЁЃЪфШыгфГіЯЕЭГгЩL/OАхЕЅдЊзщГЩЃЌЛњЦїШЫЯЕЭГзюЖржЇГж4ПщL/OАхЕЅдЊЁЃУППщL/OАхга16ИіЪфШыЕуКЭ16ИіЪфГіЕуЁЃL/OЕЅдЊАхЪЙгУЪ§зжКЭФЃФтЪфШыЪфГіаХКХгыЭтВПЦфЫќЩшБИЭЈбЖЁЃL/OАхЕЅдЊЭЈЙ§CANBusзмЯпКЭМЦЫуЛњЯЕЃЌЭГСЌНгЃЌЭЈЙ§вЛЖдвЛЕМЯпгыЭтВПЩшБИPLCЭЈбЖЁЃ
КИНгЛњЦїШЫЪфШыЪфГіЯЕЭГЭЈЙ§ЭтВПPLCгыКИНгЩшБИЭЈбЖЁЃЛњЦїШЫЕФвЦЖЏКИНгЁВзїЙ§ГЬ:ЛњЦїШЫвЦЖЏЕНКИНгЙЄзїЕуЮЛжУЃЌПижЦЯЕЭГгЩЪфШыЪфГіЯЕЭГЭЈЙ§ЭтВПPLCЯђКИНгПижЦЯфЗЂГіЦєЖЏКИНгБЖКХ.КИНгПижЦЯфЗЂГіаХКХКИЧЙБеКЯКИНгПЊЪМ.КИНгНсЪјПижЦЯфЗЂГіКИНгЭъСЫаХКХЃЌДђПЊКИЧЙЃЌЛњЦїШЫНгЪеКИНгЭъСЫаХКХКЭКИЧЙДђПЊЕНЮЛаХКХКѓЗЂГівЦЙІаХКХЃЌЛњЦїШЫвЦЖЏЕНЯТвЛКИНгЙЄзїЕуЮЛжУЁЃ
ЁЁЁЁ2ЁЂЛњЦїШЫГЃМћЙЪеЯЗжЮі
ЁЁЁЁ03БЈОЏЪЧКИНгЛњЦїШЫКИНгБфбЙЦїЙ§ШШБЈОЏЃЌдкКИНгБфбЙЦїЦпгавЛИіЮТЖШЙ§ШШБЃЛЄЃЌБЃЛЄаХКХЭЈЙ§L/OЯЕЭГгыЛњЦїШЫЭЈбЖ.ЪмАВШЋУцАхМрПи.ЕБетИіЙ§ШШБЃЛЄЫ№ЛЕЛђСЌНгЕМЯпЖЯТЗОљПЩвддьГЩДЫЙЪеЯ;04БЈОЏЪЧКИНгЛњЦїШЫКИНгвьГЃБЈОЏЁЃЛњЦїШЫЗЂГіКИНгЦєЖЏаХКХИјКИНгПижЦЯф.КИНгПижЦЯфЗЂГіКИЧЙБеКЯКЭКИНгПЊЪМаХКХЃЌКИНгЭъГЩКѓЗЕЛиКИНгЭъСЫаХКХИјЛњЦїШЫЁЃЕБЛњЦїШЫНгЪеВЛЕНКИНгЭъСЫаХКХЪБ04БЈОЏЁЃдьГЩетвЛЙЪеЯЕФдвђПЩФмга:КИЧЙУЛгаКЯЁЃУЛгаЭъГЩКИНгЙ§ГЬ;ЕчМЋЭЗЖЬЃЌУЛгаЭъГЩКИНгЙ§ГЬ.КИНгВПМўБэУцгавьЮягАЯьКИНгЙ§ГЬ.КИНгЕчРТЖЯЁЃУЛгаЭъГЩКИНгЃЌЛњЦїШЫЭЖгаНгЪеЕНКИНгЭъСЫаХКХЁЃ
ЁЁЁЁ05БЈОЏЪЧгЩгкЛњЦїШЫдкКИНгвЦЖЏЙ§ГЬжагіЕНЭтНчзшСІ.ЛњЦїШЫЯЕЭГгаЙ§диМрПиБЃЛЄЃЌЕБДяЕНМрПиМЖБ№ЕФзшСІЪБЯЕЭГБЈОЏ01ЁЂ02БЈОЏЪЧЛњЦїШЫМрПиАВШЋСДЩЯЕФЪОНЬЦїМБЭЃ.УцАхМБЭЃ.АВШЋУХМБЭЃПЊЙиЖЯПЊ.ЫЋАВШЋСДЖЯПЊ.ЛњЦїШЫMOTOROFFжйжнНКОЏЁЃGUN TIME-OUTЪЧЛњЦїШыКИНгНсЕуКѓЃЌКИЧЙДђПЊЕНЮЛПЊЙиМьВтКѓ.ЛњЦїШЫВХФмЙЛМЬајвЦЖЏЃЌЗёдђЛњЦїШЫОЭЛсШЯЮЊКИЧЙУЛгаДђПЊЖјБЈОЏЃЌВЛдйЖбајвЦЖЏTзїЁЃМьВтПЊЙивЛАуЖМЪЧКИЧЙаЁеХПкПЊЙиЁЃдвђПЩФмга:МьВрПЊЙиЫ№ЛЕЃЌПЊЙиЯпТЗЖЯТЗЁЃЕЋгаЕФЪБКђЛњЦїШЫвВПЩвдШЁЯћМьВтЙІФм.дкКИЧЙКДНгЭъСЫКѓЃЌКИЧЙДђПЊЕФЪБЛњЦїШЫОЭПЩвдвЦЖЏЃЌетЪБПЩвдЯФаоИФКИЧЙДђПЊЪБМфВЮЪ§РДПижЦКИНгКЭвЦЖЏЙ§ГЬЁЃ
ЮФеТРДдДЃЌ
ЙЄвЕЛњЦїШЫЮЌаоЙйЭјЃКwww.zr-abb.com

 ЛњЦїШЫзЪбЖ
ЛњЦїШЫзЪбЖ 80%ЦѓвЕУцСйЕЙБеЃЌЙЄвЕЛњЦїШЫВњФмбЯжиЙ§ЪЃ
80%ЦѓвЕУцСйЕЙБеЃЌЙЄвЕЛњЦїШЫВњФмбЯжиЙ§ЪЃ
 ЪзвГ > ABBЧ§ЖЏФЃПщЮЌао >
ЪзвГ > ABBЧ§ЖЏФЃПщЮЌао > 
