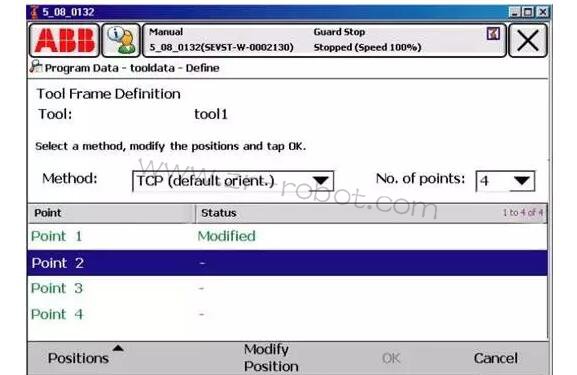
简介:ABB机器人维修选择用于定义工具框的方法 1. 在 ABB 菜单中,点击微动控制。 2. 点击工具,显示可用工具列表。 3. 选择想要定义的工具。 4. 在编辑 菜单中,点击定义。 5. 在出现的对话框中,选择要使用的方法。 6. 选择要使用的接近点的点数。 通常4 点就足……
1. 在 ABB 菜单中,点击微动控制。
2. 点击工具,显示可用工具列表。
3. 选择想要定义的工具。
4. 在“编辑” 菜单中,点击定义。
5. 在出现的对话框中,选择要使用的方法。
6. 选择要使用的接近点的点数。 通常4 点就足够了。
如果您为了获得更精确的结果而选取了更多的点数,则应在定义每个接近点时均同样小心。
7. 有关如何收集位置和执行工具框定义的详情
工具数据:
使用值设置功能来设置工具的中心点位置和物理属性,如重量和重心。
该操作也可使用服务例行程序LoadIdentify自动完成。
显示工具数据:
1. 在 ABB 菜单中,点击微动控制。
2. 点击工具,显示可用工具列表。
3. 选择您想要编辑的工具,然后点击编辑。
一个菜单出现。
更改声明
更改值
删除
定义
4. 在菜单中,点击更改值。
这时会显示定义该工具的数据。绿色文本表示该值可以更改。
5. 依照以下步骤更改数据。
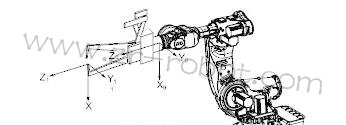
测量工具中心点:
X0 tool0 的 X 轴
Y0 tool0 的 Y 轴
Z0 tool0 的 Z 轴
X1 待定义工具的X 轴
Y1 待定义工具的Y 轴
Z1 待定义工具的Z 轴
操作
1. 沿 tool0 的 X 轴,测量机器人安装法兰到工具中心点的距离。
2. 沿 tool0 的 Y 轴,测量机器人安装法兰到工具中心点的距离。
3. 沿 tool0 的 Z 轴,测量机器人安装法兰到工具中心点的距离。
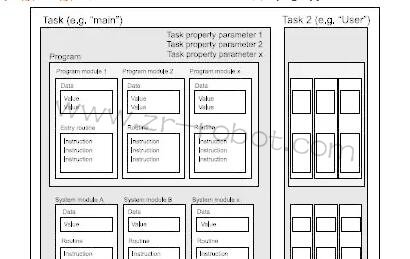
模块与程序
系统参数:EIO(输入输出IO)、PROC(过程文件)、MMC(存储控制)、SIO(系统输入输出)、MOC、SYS(系统参数)
编程的准备事项:
1)编程工具:
您可以使用 FlexPendant 和 RobotStudioOnline 来编程。 对于基本编程,使用RobotStudio Online 较易,而 FlexPendant 更适合修改程序,如位置及路径。
2)定义工具、有效载荷和工件:
在开始编程前定义工具、有效载荷和工件。然后,您可以随时返回再定义更多对象,但应事先定义一些基本对象。
3.定义坐标系
确保已在机器人系统安装过程中设置了基坐标系和大地坐标系。同时确保附加轴也已设置。在开始编程前,根据需要定义工具坐标系和工件坐标系。以后添加更多对象时,您同样需要定义相应坐标系。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > 维修案例 >
首页 > 维修案例 >