简介: 随着机器人喷涂技术的日益成熟,喷涂机器人开始应用。ABB IRB5500机器人自动喷涂系统,详细地介绍了喷涂系统各部分的组成,重点介绍了控制系统及软件。……
ABB IRB5500机器人自动喷涂系统
随着机器人喷涂技术的日益成熟,
喷涂机器人开始应用。ABB IRB5500机器人自动喷涂系统,详细地介绍了喷涂系统各部分的组成,重点介绍了控制系统及软件。机器人自动喷涂系统大大提高了喷涂质量和生产效率,取得良好的应用效果。
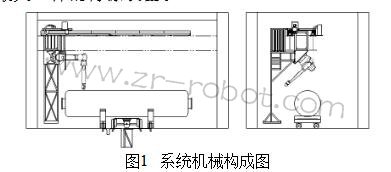
1、喷涂系统构成 工件通过轨道运送到喷漆室内,停放在喷涂工位上;在喷漆室顶部安装有沿喷漆室长度方向的移动导轨,喷涂机器人布置在移动导轨移动滑板上,喷涂机器人在移动导轨滑板上可沿着工件长度做往复运动,机器人能够在工件全长方向上进行喷漆作业。 本系统由ABB IRB5500喷涂机器人1台、机器人移动装置1套、工作站总控系统1套、涂料输送及清洗系统1套、工件位置检测及启动装置1套构成。
1.1 ABB IRB5500喷涂机器人 根据喷涂工艺要求,该喷涂系统选用挪威原产倒挂式ABB IRB5500喷涂机器人进行喷涂作业。该机器人以其独特的设计和壁挂安装的方式,使其自身拥有最大的工作范围和最大的柔性,而且具有高加速度、高喷涂速度,适用于大型工件外表面的喷涂。
1.2 机器人移动装置
机器人移动装置安装在喷漆室上方的两根土建预埋的钢梁上,该移动装置可使机器人沿工件长度方向往复移动, 使机器人动作范围尽可能覆盖最大工件的待涂表面。
2、工作站控制系统 工作站控制系统主要由以下几个部分组成,如图2所示
2.1 iFIX上位监控系统 研华工控机为硬件平台,安装全球领先的HMI/SCADA自动化监控组态软件iFIX作为上位监控界面,负责系统的综合管理,实现生产操作的过程可视化、数据采集和数据监控、自动生产数据统计及打印报表,故障记录报警显示管理等。在工控机上安装simatic net作为opc服务器,配备cp5611通讯卡,通过PROFIBUS-DP建立OPC服务器与S7-300PLC的通讯连接。iFIX是基于OPC技术的,可做OPC客户端,访问OPC服务器,从而实现与S7-300PLC的通信。
2.2 总控系统,完成对上位监控系统、机器人控制系统、机器人伺服导轨装置、工件位置检测及启动装置等的协调与控制。系统采用PLC作为中央控制单元,通过PROFIBUS-DP方式与上位机实时进行信息交换,接受上位机发来的各种命令并对其进行相应的处理;通过PROFIBUS-DP方式对机器人移动装置进行实时控制;通过I/O方式对机器人控制系统发送控制命令,并接收机器人工作过程中返回的状态信息;通过I/O方式完成对系统的其他外围信号的采集与处理。总控系统具有故障显示功能,便于设备排除故障。总控系统与系统各个部分实时交互状态信息,确保整个喷涂系统协调有序工作。
2.3 机器人控制系统 采用S4P+系统,与总控系统之间通过I/O方式进行通讯。主要完成在自动喷漆过程中对自动喷涂运动轨迹进行控制,可以对喷枪的流量、扇面、雾化进行自动设置,并对开关枪进行自动控制。对喷涂的工艺程序采用示教再现的工作方式,对不同的喷涂轨迹设置不同的程序号。在自动运行的情况下,机器人接收总控系统发来的程序。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB机器人维修 > ABB喷涂机器人 >
首页 > ABB机器人维修 > ABB喷涂机器人 >