简介:ABB机器人维修及报警故障检查 1. 机器人报警20252,电机温度高,DRV1 处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是控制柜处航空插头没插好)。如果查不出问题,又着急用机器人,可临时将报警信号短接,不过注意,此时电机真正……
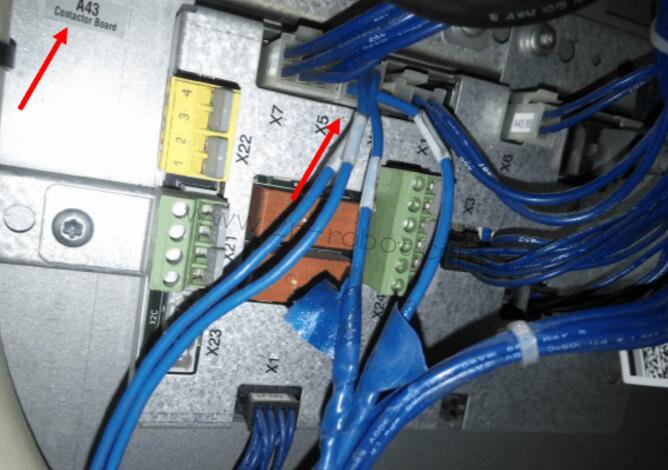
1. 机器人报警“20252”,电机温度高,DRV1 处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是控制柜处航空插头没插好)。如果查不出问题,又着急用机器人,可临时将报警信号短接,不过注意,此时电机真正过热后也不会报警,可能会引起电机烧毁!具体方式如下:在控制柜左下角找到A43板,找到板子上X5插头,上边有4根线,其中线号为439和440的两根线就是电机过热报警信号线,将两根线从中间断开,把板子这边的两根线短接即可。
2. ABB
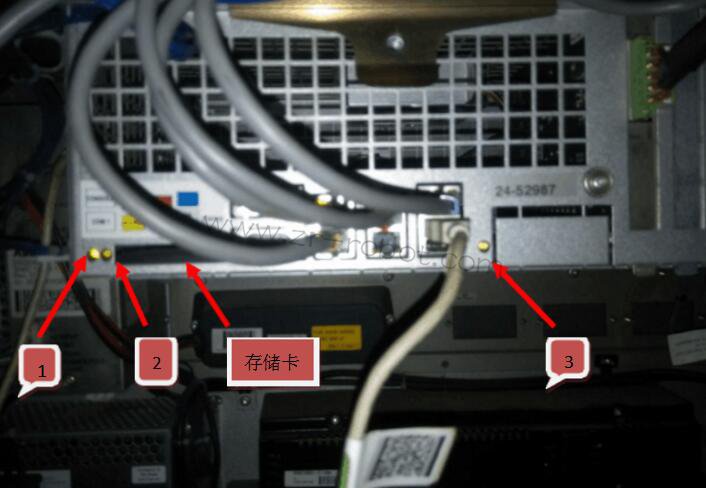
机器人维修检查工控机主板是否正常的方法:工控机上有3个LED灯,如下图所示
ABB机器人维修1号灯为电源指示灯,只要电源打到开位此灯就常亮,如此灯不亮则检查工控机电源是否正常。 2号灯为开机程序引导指示灯,开机过程中闪烁,开机完成后灯灭。开机程序保存在存储卡中,如开机过程中此灯不闪烁,则可能是存储卡故障。
3号灯为主板状态指示灯,开机过程中先是红灯闪烁,后变为绿灯闪烁,最后绿灯常亮,如果此灯最后显示红色或者不亮,则主板有问题,如果按上述过程依次点亮,则证明主板是正常的。
3. 如果机器人系统异常或崩溃,可先尝试用“B启动”重新启动,即可恢复到最近的正产状态。
4. 机器人I/O状态都丢失,检查控制柜中I/O板,在控制柜柜门的右下角,检查板子上的指示灯是否点亮,如果灯都不亮则检查I/O板的电源和电源的保险(如下红色箭头所示),如果只是个别I/O丢失,则查看板子上对应的接线端子,看线是否松动。
5. 如果一垛铝锭抓取完了,机器人还继续往下抓,检查轨道末端的光电眼,看其是不是没有对正对侧的反光板,或者是光电眼损坏。
6. 如果机器人在自动运行过程中突然不动了,需要查看示教器上显示的程序运行位置,看是否在等待某一I/O信号,然后检查相应的信号源是否正常。
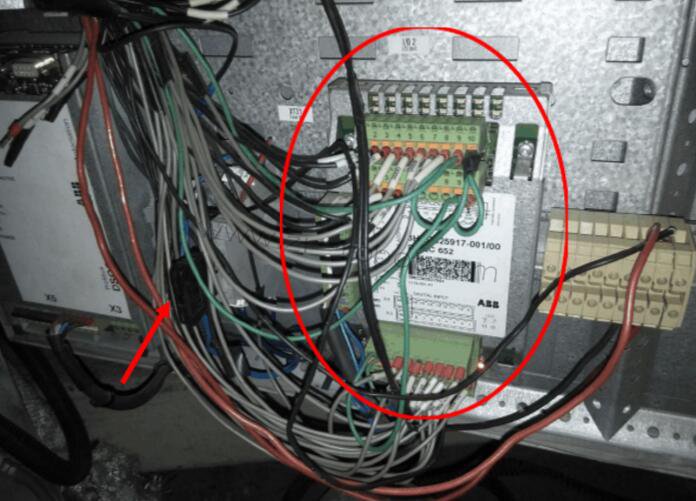
7. 如果外部急停按钮都已经解开而机器人一直报紧急停止,则检查控制柜右侧壁右上角的板子(panel board),X1端子的3、4号端子控制机器人的紧急停止,如果3、4号端子之间的连线断开,机器人就报紧急停止。增加外部操作箱改造后,将3、4号端子打开,中间串入外部两个操作箱的紧急停止按钮的常闭点,串联的点在控制柜柜门右下角的接线排处,如下面图所示。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > 维修案例 >
首页 > 维修案例 >