简介:据6月26日新加坡《联合早报》26日报道,英国牛津经济研究所发表报告称,预计到2030年,全球约2000万个制造业岗位将被机器人取代。贫富差距将进一步拉大,但整体经济产出将提高。 机器人这么厉害,那么你知道机器人的控制原理吗?今天我们就一起来了解一项ABB……
据6月26日新加坡《联合早报》26日报道,英国牛津经济研究所发表报告称,预计到2030年,全球约2000万个制造业岗位将被机器人取代。贫富差距将进一步拉大,但整体经济产出将提高。
机器人这么厉害,那么你知道机器人的控制原理吗?今天我们就一起来了解一项ABB公司关于机器人控制的专利。ABB公司作为全球电力和自动化技术领域的领导企业,致力于为工业、能源、电力、交通和建筑行业客户提供解决方案,帮助客户提高生产效率。
根据目前公开的专利申请文件,让我们一起来了解一下你所不知道的机器人控制方法吧
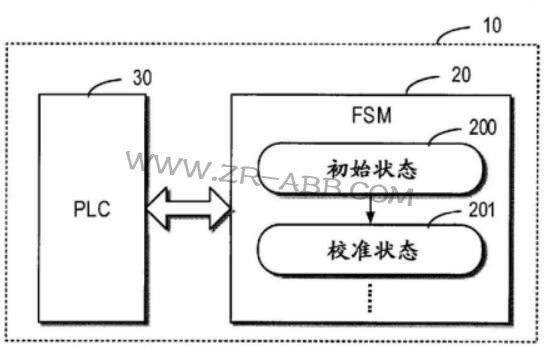
如上图所示为用于控制机器人的系统框图,整个系统包括可编程控制器(PLC),PLC被配置为基于有限状态机来定义机器人的多个状态和相关联的多个操作以及多个状态之间的切换。
这里的FSM包括至少两个新状态:初始状态和校准状态。添加了初始状态可以使得自测程序能够检查机器人的部件是否能够正确地操作,并且校准状态被配置用于校准机器人。
这两种状态都是非常有用的,例如机器人由于某种原因不能启动,则初始状态可以向用户提供包含重要消息的信号,从而有助于机器人系统的故障排除或维护。此外校准状态可以额外地检查机器人是否已经被校准。利用这两个新引入的状态与其他状态以及相关联的切换条件和功能模块,这种机器人专用的FSM设计将实现改进的机器人移动控制。
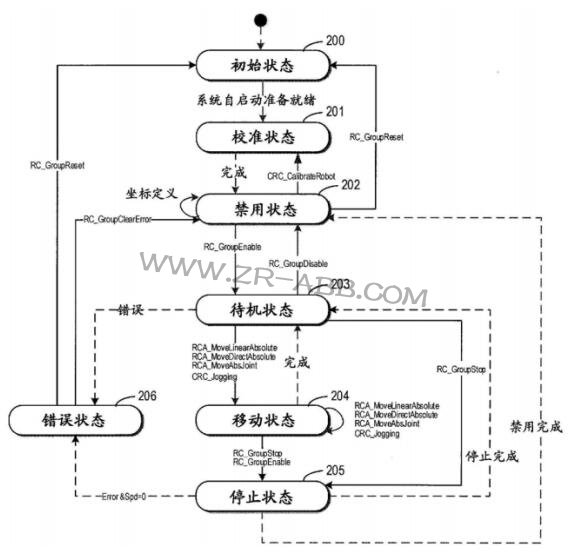
如上图是用于控制机器人的FSM示意图,其中列出了机器人所有的状态,我们将从这些状态来讲述机器人是如何执行指令的。除了初始状态和校准状态之外,FSM还包括了几个另外的状态,包括:禁用状态、待机状态、移动状态、停止状态和错误状态。如果满足特定的切换条件,则机器人将相应地再FSM内的不同状态之间切换。
在初始状态中,PLC被配置为初始化机器人以启用自测程序。此外,如果确定自测程序成功,也就是机器人的自动启动准备就绪,则PLC被配置为将机器人从初始状态转换到校准状态。
当机器人处于校准状态时,如果确定校准完成,则PLC进一步被配置为将机器人从校准状态转换到禁用状态。当机器人处于禁用状态时,如果接收到坐标指令,则PLC进一步被配置为将机器人保持在禁用状态并且激活机器人以促使定义针对机器人系统的坐标系。该坐标系对于大多数机器人尤其是
工业机器人时必不可少的,可以通过这个坐标系更加完美的控制机器人。
当机器人处于移动状态时,如果接收到点动指令,则PLC进一步被配置为将机器人保持在移动状态并且激活机器人以点动。当机器人处于移动状态时,如果接收到停止指令,则PLC进一步被配置为将机器人从移动状态转换到停止状态以停止机器人的任何移动。
在这些操作中,停止指令可以被进一步被分类为不同类型。例如:停止指令可以包括被配置为在检测到错误时停止机器人的移动的第一停止指令。停止指令还可以包括被配置为停止机器人的移动并同时根据需要断开对机器人的电力供应。
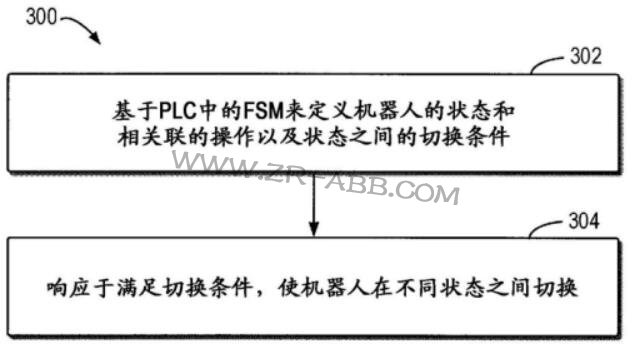
上图定义了用于控制机器人的方法的流程图,而上述的具体的细节则包含在这些流程中。首先基于PLC中的FSM来定义机器人的多个状态和相关联的多个操作以及多个状态之间的切换条件。如果满足条件,则机器人在不同的状态之间切换。
在某些时候,使机器人在不同状态之间切换包括在初始状态中初始化机器人以启用自测试程序。状态切换还包括如果确定自测程序成功,则将机器人从初始状态转换到校准状态。
看到这里相信你对于机器人的控制方法应该有了更加具体的了解,机器人对于人们的生产和生活自从工业时代就一直产生着深远的影响,那么对于即将到来的人工智能时代,相信也必将会带来一轮新的创新和创造,我们将持续关注!
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > 机器人资讯 >
首页 > 机器人资讯 > 

