简介:摘要:随着社会进步、科技发展,工业机器人的应用也越来越普遍。由于其种类众多、运动轴与坐标系也很多,确定起来容易出错,对于新手尤其如此。本文主要介绍了工业机器人运动轴的命名、坐标系的确定原则及其常用种类,以期对工业机器人的应用起到一定的参考……
1. 机器人运动轴
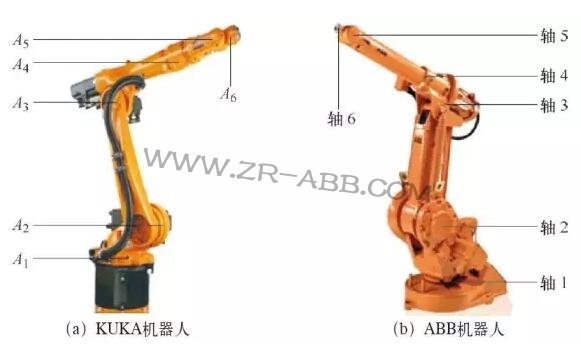
工业机器人在生产中,一般需要配备除了自身性能特点的外围设备,如转动工件的回转台,移动工件的移动台等。这些外围设备的运动和位置控制都需要与工业机器人相配合并要求相应精度。通常机器人运动轴按其功能可划分为机器人轴、基座轴和工装轴,基座轴和工装轴统称外部轴。
2. 机器人坐标系确定
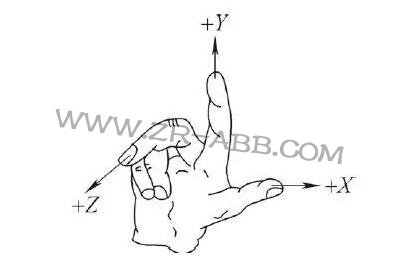
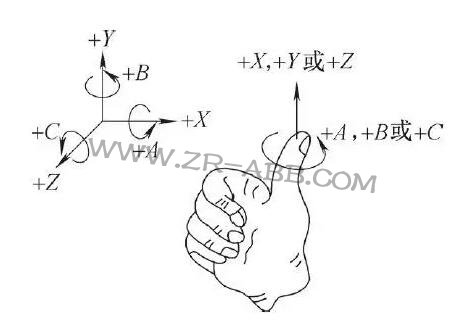
机器人的各种坐标系都由正交的右手定则来决定,如图3所示。当围绕平行于X 、Y 、Z 轴线的各轴旋转时,分别定义为A 、B 、C 。A 、B 、C 的正方向分别是X 、Y 、Z 正方向上右手螺旋前进的方向(见图4)。
常用的坐标系是绝对坐标系、机座坐标系、机械接口坐标系和工具坐标系。
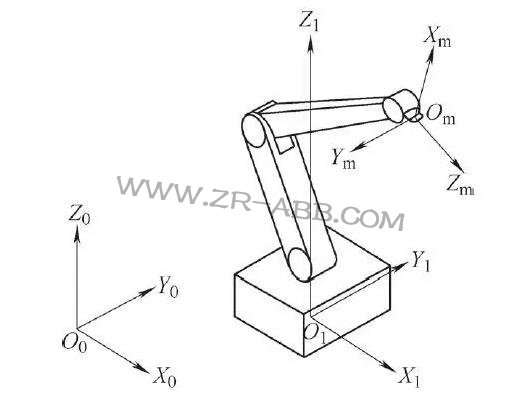
(1)绝对坐标系与机器人的运动无关,以地球为参照系的固定坐标系(见图5),符号为O 0、X 0、Y 0、Z 0。原点O 0、+X 0轴由用户根据需要来确定;+Z 0轴与重力加速度的矢量共线,但方向相反。
(2)机座坐标系是以机器人机座安装平面为参照系的坐标系,符号为O 1、X 1、Y 1、Z 1。原点O 1由机器人制造厂规定;+Z 1轴垂直于机器人机座安装面,指向机器人机体;X1轴方向由原点指向机器人工作空间中心点Cw(见GB/T12644—2001)在机座安装面上的投影。当由于机器人的构造不能实现此约定时,X 1轴的方向可由制造厂规定。
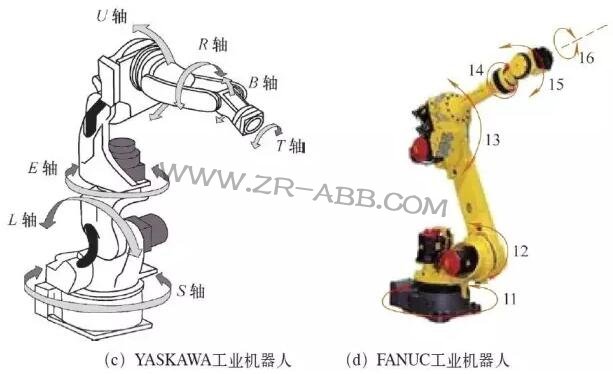
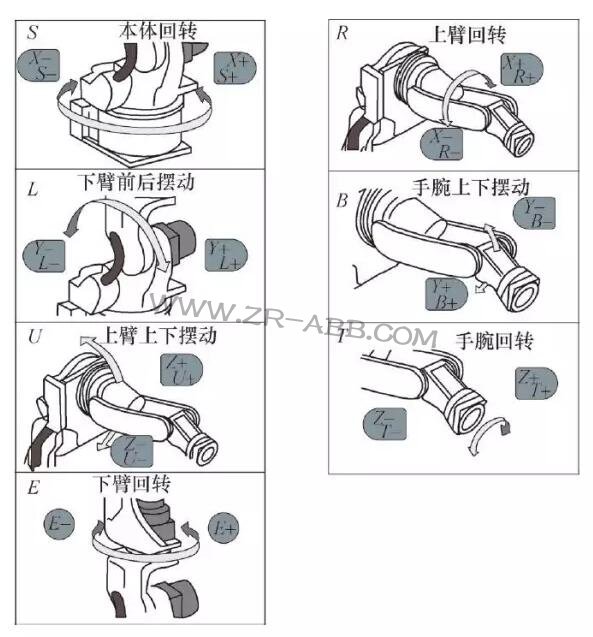
(3)机械接口坐标系是以机械接口为参照系,符号为O m、X m、Y m、Z m。原点O m是机械接口的中心;+Z m轴的方向垂直于机械接口中心,并由此指向末端执行器;+X m轴由机械接口平面和X 1、Z 1平面(或平行于X 1、Z 1图2 YASKAWA工业机器人各运动轴的关系图3 右手坐标系 图4 旋转坐标系图5 坐标系示例图6 工具坐标系的平面)的交线来定义,同时机器人的主、副关节轴处于运动范围的中间位置。当机器人构造不能实现此约定时,应由制造厂规定主关节轴位置。+X m轴的指向远离Z 1轴。
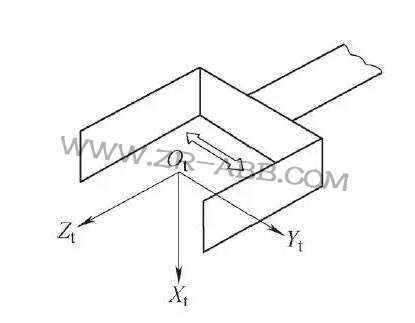
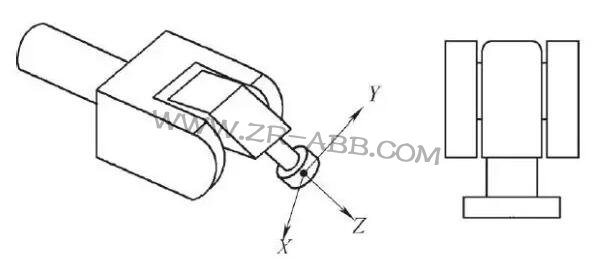
(4)工具坐标系以安装在机械接口上的末端执行器为参照系(见图6),符号为O t、X t、Y t、Z t。原点O t是工具中心点(TCP);+Zt轴与工具有关,通常是工具指向;在平板式夹爪型夹持器夹持时,+Y t是手指运动平面的方向。
3. 工业机器人常用坐标系
(1) 基坐标系( B a s eCoordinate System),又称为机座坐标系,位于机器人基座。如图5所示,它是最便于机器人从一个位置移动到另一个位置的坐标系。基坐标系在机器人基座中有相应的零点,这使固定安装机器人的移动具有可预测性。在正常配置的机器人系统中,工人可通过控制杆进行该坐标系的移动。
(2)世界坐标系(Wo r l dCoordinate System),又称为大地坐标系或绝对坐标系。如果机器人安装在地面, 在基坐标系下示教编程很容易,但当机器人吊装时,机器人末端移动直观性差,因而示教编程较为困难。
另外,如果两台或多台机器人共同协作时,例如,一台安装于地面,另一台倒置,倒置机器人的基坐标系也将上下颠倒( 见图7)。当分别在两台机器人的基坐标系A 、B 中进行运动控制时,很难预测相互协作运动的情况。
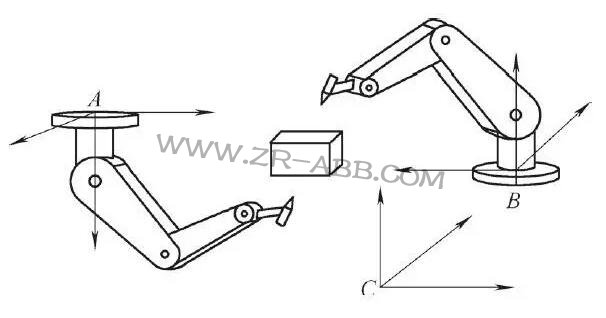
此时,可以定义一个共同的世界坐标系C 取而代之。若无特殊说明,单台机器人世界坐标系和基坐标系是重合的。
(3) 用户坐标系(U s e rCoordinate System),机器人可以和不同的工作台或夹具配合工作, 在每个工作台上建立一个用户坐标系。机器人大部分采用示教编程的方式,步骤繁琐,对于相同工件,若放置在不同工作台进行操作,不必重新编程,只需相应地变换到当前用户坐标系下。用户坐标系在基坐标系或者世界坐标系下建立。
(4)工件坐标系(Obje c tCoordinate System)与工件相关,通常最适于对机器人进行编图7 世界坐标系程。工件坐标系对应工件,它定义工件相对于大地坐标系(或其他坐标系)的位置。
工件坐标系拥有特定附加属性,主要用于简化编程。他拥有两个框架:用户框架(与大地基座相关)和工件框架(与用户框架相关) 。机器人可以拥有若干工件坐标系, 表示不同工件,或者表示同一工件在不同位置的若干状态。对机器人进行编程就是在工件坐标系中创建目标和路径,重新定位工作站中的工件时,只需更改工件坐标系的位置,所有路径将随之更新。允许操作以外轴或传送导轨移动的工件,因为整个工件可连同其路径一起移动。
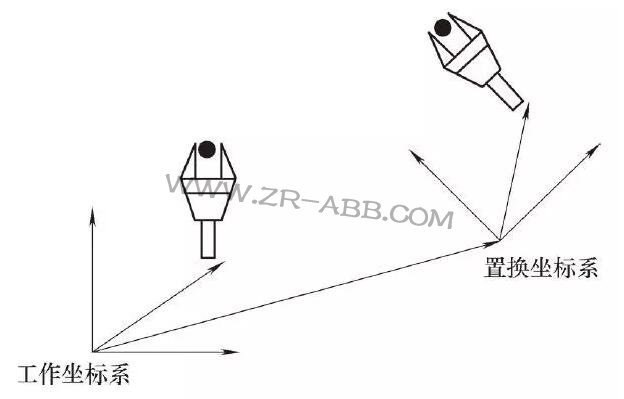
(5) 置换坐标系(Displacement CoordinateSystem)又称为位移坐标系,有时需要对同一工件、同一段轨迹在不同工位上加工,为了避免每次重新编程,可以定义一个置换坐标系。置换坐标系基于工件坐标系定义。如图8所示,当置换坐标系被激活后,程序中的所有点都将被置换。
(6) 腕坐标系(WristCoordinate System)和工具坐标系都是用来定义工具方向的。在简单应用中,腕坐标系可以定义为工具坐标系,两者重合。腕坐标系的Z 轴和机器人的第6根轴重合,如图9所示,坐标系原点位于末端法兰盘中心,X 轴方向与图8 置换坐标系图9 腕坐标系法兰盘上标识孔的方向相同或相反,Z 轴垂直向外,Y 轴符合右手法则。
(7) 工具坐标系(ToolCoordinate System)安装在末端法兰盘上的工具需要在其中心点(TCP)定义一个工具坐标系,通过坐标系的转换,可以操作机器人在工具坐标系下运动,以方便操作。如果工具磨损或更换,只需重新定义工具坐标系,而不用更改程序。工具坐标系建立在腕坐标系下,即两者之间的相对位置和姿态是确定的。
(8) 关节坐标系(Join tCoordinate System)用来描述机器人每个独立关节的运动,关节类型可能不同( 如移动关节、转动关节等)。若将机器人末端移动到期望位置,在关节坐标系下操作,可以依次驱动各关节运动,从而引导机器人末端到达指定的位置。
4. 结语
由于工业机器人品种众多,每种工业机器人的坐标系也很多,其命名、确定方式虽然有标准,但是有的生产厂家又不按标准执行, 各有各的叫法。在实际生产应用时就显得非常混乱麻烦。本文详细介绍了工业机器人坐标轴命名与常用坐标系的确定,以期对使用者有所帮助。


 首页 > 机器人资讯 >
首页 > 机器人资讯 >