简介:ABB机器人技术特点和系统主要结构 一、ABB机器人技术特点 ABB机器人的运行速度快,特别是ABB的QuickMoveTM动态自优化运动控制技术,在不做任何调整的条件下令各轴总是以最大加速度运动,这比其他机器人的生产节拍快25%。 ABB机器人还具有基于LoadIdentificat……
一、ABB机器人技术特点
ABB机器人的运行速度快,特别是ABB的QuickMoveTM动态自优化运动控制技术,在不做任何调整的条件下令各轴总是以最大加速度运动,这比其他机器人的生产节拍快25%。
ABB机器人还具有基于LoadIdentification技术的智能防碰撞功能,碰撞时将碰撞力降低到30%。
二、ABB机器人系统的主要特点和适用条件
ABB机器人系统主要用于压路机左右油箱、铰接座的焊接。人工吊装工件,手动夹紧工件。工件旋转运用ABB机器人IRBP500A变位机,可在焊接时与机器人协调运动,确保所有焊缝均处于最佳焊接位置。另外ABB弧焊机器人系统与Kemppi肯倍脉冲焊机通信进行焊接,不仅可以保证焊接质量,而且焊缝更加美观。操作人员通过按钮进行设备的操作,整套控制系统操作简单,易于被一般工程技术人员掌握。
ABB机器人系统适用于以下工矿:周围空气温度,焊接时5~+45℃;运输和存储过程时5~+55℃。空气相对湿度,在40℃时≤50%;在20℃时≤90%。海拔高度≤1000m。机器人电源三相380V、50Hz。
三、ABB机器人系统主要结构
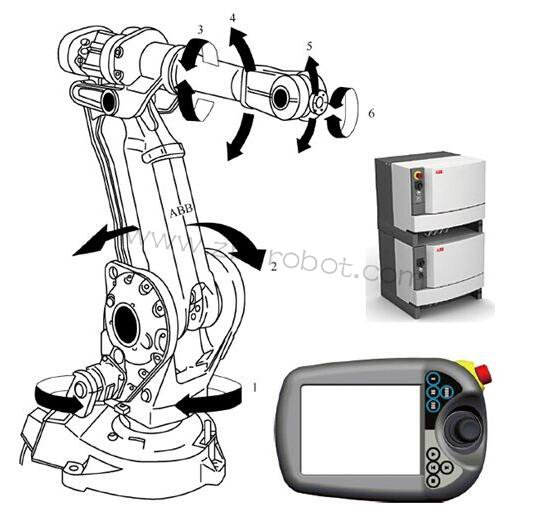
一个系统一般由机器人、控制柜、示教器三大部分组成,本系统采用ABBSRT—Robot—IRB2400L6轴机器人(见图),理论上可到达工作半径(f1810mm)的任何位置,重复定位精度可达到0.06mm;弧焊机为Kemppi肯倍脉冲焊机,该焊机具有节能、功率因数高、飞溅少、焊接质量可靠等特点,可储存128套焊接参数,满足各种不同板材焊接,使焊接更加细化;三套夹具采用独立式上下件,大大提高了生产效率。落地式变位机,满足工件的各部位焊接。
要满足机器人要求苛刻的一元化专业焊接,配套的焊接电源必须具有特定功能。本系统配备的是数字脉冲焊接电源Kemparc—Pulse450气体保护焊机,该焊机主要特点:高效、大功率焊接电源;结构紧凑,重量轻,模块化设计;90(对于一元化焊接电源)/100(对于脉冲焊接电源)个存储通道,用于保存不同的焊接工艺;TouchSensing为标准配置功能;数控版通过数据总线实现全数字通信;支持多种总线协议等。
机器人系统主要控制有5个输出信号:焊机开关信号(Do_Weld),送气信号(Do_Gas),手动送丝信号(Do_Feed),焊接电流控制信号(Ao_Current)和焊接电压控制信号(Ao_Voltage);1个输入信号:电弧建立信号(Di_ArcE)。在自动焊接系统中,只需要在机器人的PROC中配置个5个焊接参数:Do_Weid1,Do_Gas,Ao_Current,Ao_Voltage1,Di;机器人根据设置的不同焊接参数对Di_ArcEAo_Current和Ao_Vo1tage两个模拟信号的控制来达到对焊接电流和电压的控制。
焊机的送丝电动机使用了Kemppi最新的DURATorque.送丝机构——DT400送丝机,并采用全金属送丝轮设计。DT400送丝电动机有一个反馈信号计,连接在该送丝机内部的24芯插头上。该焊机还具有Touchsensing功能和防粘丝功能。
四、ABB机器人控制系统软件
首先工人手工安装工件,安装到位后,夹具中有工件型号,机器人根据不同型号工件,选择不同焊接程序,实现了自动检测、自动焊接,使机器人与外部设备紧密结合。其中在焊接过程中,变位机不断的依据程序中设置的位置使焊接姿态达到最佳。
五、结语
ABB机器人弧焊控制系统提高了生产效率,保证了焊接质量,至今已连续工作两年,生产各种零件达万件,稳定性、可靠性高,带来了很大的经济效益。若再增加一个落地式变位器可组成双工位,生产效率将更高。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > 机器人资讯 >
首页 > 机器人资讯 >