简介:ABB是全球领先的工业机器人技术供应商,提供包括机器人本体,软件和外围设备在内的完整应用解决方案。模块化制造单元及服务。ABB机器人在全球53个国家、100多个地区开展业务,全球累计装机量30余万台,涉及广泛的行业和应用领域。我们致力于帮助客户提高生产……
ABB是全球领先的
工业机器人技术供应商,提供包括机器人本体,软件和外围设备在内的完整应用解决方案。模块化制造单元及服务。
ABB机器人在全球53个国家、100多个地区开展业务,全球累计装机量30余万台,涉及广泛的行业和应用领域。我们致力于帮助客户提高生产效率、改善产品质量、提升安全水平。
4月17日,中国自动化学会创新驱动助力工程系列活动在浙江绍兴拉开序幕。ABB集团亚洲、中东及非洲区总裁顾纯元博士受邀在2019国家机器人发展论坛发表题为“人机协作引领机器人产业未来发展”的主题演讲;在同期举行的中国自动化产业年会上,ABB集团中国研究院负责人、ABB中国首席技术官刘前进博士出席业界领袖论坛并发言;同时,ABB在该活动上获评多项自动化行业大奖,并正式启动了2019 ABB杯全国智能技术创新大赛。
笔者检索了ABB近日公开一项发明专利(CN201780056349.9,一种对工业机器人编程的方法,公开日期2019年4月26日),针对现有机器人编程技术复杂、难学耗时或简单编程方法有局限性的问题进行了改进。
1、现有技术
工业机器人是自动化机器,其能够被编程来执行结合它们的末端执行器(类似夹持器(gripper)或焊接工具等)的空间运动的不同操纵任务。传统上,用运动控制函数在过程编程语言中对工业机器人编程,其中运动控制函数典型地利用位置和速度作为输入参数。这需要有关编程语言和函数的使用的知识和技能。此外,机器人的适当和准确的位置数据和速度分布的定义可能是困难和耗时的。
一般向商用工业机器人提供教导器(teach pendant),借助于所述教导器,操作员能够“推动(jog)”机器人移动到期望的位置并且采用这个作为用于运动函数的输入参数。虽然这个技术降低了人工数据输入的量,但是对机器人的推动需要许多技术和经验并且仍可能是耗时的。
正被用于对一些机器人编程的另一种技术是所谓的“带领(lead-through)”,其中,机器人由手握住并且跟随人手的移动。这仅能够被应用于满足对应安全性要求并且支持这样的操作的模式的机器人。
“通过示范的编程”是另外的技术,通过该技术,人的动作被跟踪和解释以获得机器人指令。此技术中涉及的一个问题是以不足的可靠性来解释人的姿势并且不能以必要的准确性来获得用于控制机器人运动的期望的参数。此外,此方法的另外的缺点是在小组件的装配的示范期间,这些组件常被人手他们自身从视野遮蔽。
使用基于视觉的对象本地化的面向对象的技术一般也要求对适当的视觉作业的编程,其甚至更加难以由应用工程师学习和执行。
此外,考虑到人们习惯利用类似个人计算机、平板计算机或智能电话的计算装置来工作,且所述计算装置提供允许在计算装置的显示器上标记、旋转、调整大小或移动图形元素的人机接口和图形用户界面(GUI)。因此,用已知的计算装置来显示和操纵相机图像是十分简单的,使得图形和图像的直接操纵已大体上变成用户-计算机交互的直观方式。
解读:针对现有工业机器人编程技术复杂、难学耗时或部分简单编程技术的局限性,考虑到现有计算机的图形+图像技术的成熟,本发明的旨在提供一种更简单、更人机友好的对工业机器人简单编程的方法。
2、本案的技术方案
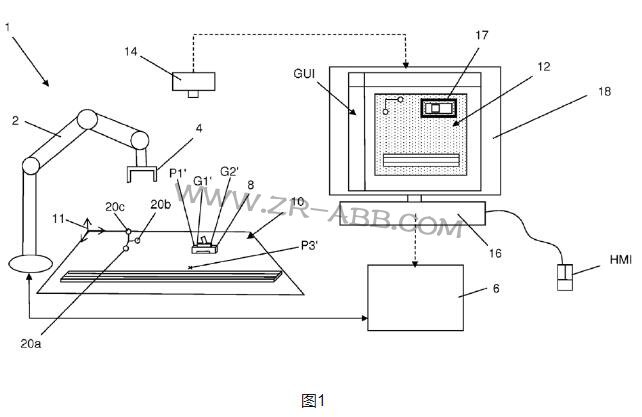
如图1所示是本发明应用于实际现场的示意图。本发明对工业机器人(1)编程的方法,所述机器人(1)具有机器人臂(2),所述机器人臂(2)具有末端执行器(4),所述末端执行器(4)被安装到所述机器人臂(2),所述机器人(1)由机器人控制单元(6)控制来操纵被布置在所述机器人(1)的工作空间(10)中的工件(8),其中目标坐标(11)系与所述工作空间(10)相关联并且所述工作空间(10)和所述工件(8)的图像(12)由图像捕捉装置(14)取得并被传送到具有人机接口(HMI)的计算装置(16)来生成控制代码以用于控制所述机器人(1),所述控制代码被传送到所述机器人控制单元(6)。
根据本发明,对机器人编程的方法包括下面的一般步骤:
1)用相机(14)来取得要被操纵的工件(8)和机器人(1)的工作空间(10)的数码照片;
2)将图像传递到计算装置(16),在所述计算装置(16)上执行同时显示图像并且提供控制按钮(24)的软件程序,所述控制按钮(24)与机器人(1)的任务(控制-动作)相关联,所述机器人(1)的任务(控制-动作)取决于所使用的机器人(1)和工具(末端执行器(4))的种类而类似移动臂、旋转臂、旋转工具、 打开夹持器、闭合夹持器或激活焊接工具等;
3)通过用标记-对象(17)(优选地用矩形框架)在图像上图形地标记工件(8)来选定工件(8);
4)经由控制按钮(24)或类似图形菜单或语音的其它输入通道(HMI)来选择机器人任务中的一个;
5)移动或定位显示屏上显示的工件的修剪的图像(cropped image)或标记对象来定义关键或目标位置;
6)使用额外的图形元素来指定类似抓取(grasp)位置、运动方向等的其它参数;
7)必要时使用其它输入通道来丰富任务参数化;
8)将每个关键位置与机器人任务一起存储为包含关键位置和关联的机器人任务的操纵步骤的序列;
9)将操纵步骤的序列从由计算装置(16)用于在显示屏上显示捕捉的图像的坐标系(19)转换到工件空间的目标坐标系(11),并且由此转换的序列生成控制代码以用于控制机器人(1)。
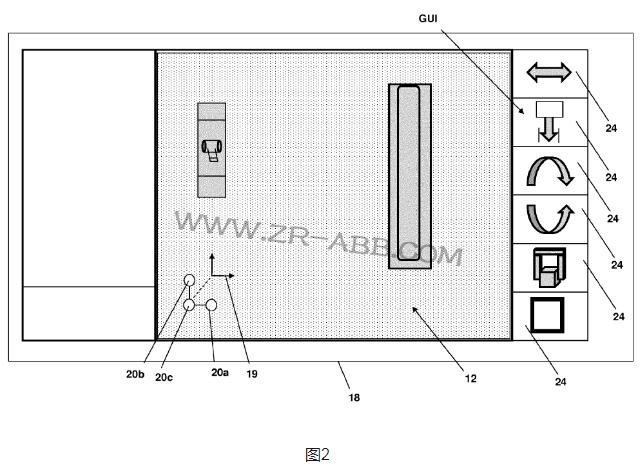
图2所示为计算装置(16)的显示器的GUI界面。
解读:本发明提供的对机器人的简单编程方法,是:
1)计算装置通过计算有限的捕捉图像的参考点,将基于计算装置的图形界面的坐标系与基于相机的图像机器人的实际工况的坐标系相互对应,使得GUI界面的机器人工况与工作空间的实际工况能够一一对应;
2)操作人员(如工程师)在GUI界面中执行控制任务,控制GUI界面中机器人及相关部件的动作(如控制末端执行器的打开和闭合,控制机器人机械臂的转动);
3)计算装置将连续的控制任务及关键位置生成并存储为操作序列,并基于步骤1)的对应关系生成控制代码;
4)计算装置将操作人员(如工程师)的控制代码实时传递给工作空间的机器人,完成对工作空间机器人的实际控制。
总的来讲,本发明提供的技术方案,类似于现有的PLC的梯型编程方法,只不过更为简单直观。
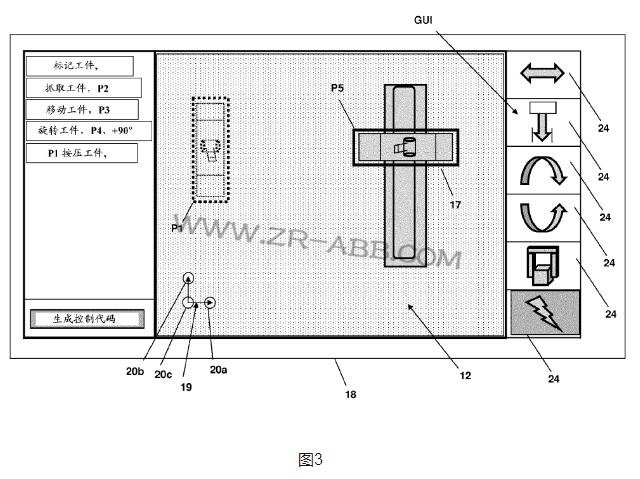
解读:图3所示为基于本发明的编程方法,控制机器人,将熔丝移动、旋转并按压如制定位置的操作序列生成控制代码的示意图。图3中的GUI界面,右侧是控制按钮,用于实现操作人员(工程师)对GUI界面的中工件操作;中部为工件工作经相机拍摄后在显示屏上显示的图形元素;右侧为操作人员(工程师)执行每一步控制任务对应的操作序列。
当操作人员(工程师)在GUI完成控制任务后,可以点击“生成控制代码”,即完成上位机的控制代码生成。通过计算装置将所述控制代码传递给工作空间的机器人,由于GUI坐标空间与工作空间坐标空间位置一一对应,机器人可在实际的工作空间完成所述控制任务。
3、总结
本发明通过计算装置及捕捉图像的参考点计算,将实际工况下的工作空间及机器人(包括末端执行器)与上位机GUI的图形空间一一对应;并提供图形化操作界面和“一站式”控制代码生成模块,大大降低了非专业人员操作机器人的编程难度,能够实现编程方法使得习惯处理智能电话和平板计算机的人们能够方便使用他们的手、笔或者计算机鼠标和键盘来实现编程。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > 机器人资讯 >
首页 > 机器人资讯 >