简介:工业机器人是机器人的一个重要分支,它的特点是可通过编程完成各种预期的作业任务,在构造和性能上兼有人和机器人各自的优点,尤其是体现了人的智能和适应性,机器作业的准确性和在各种环境中完成作业的能力。因而在国民经济各个领域中具有广阔的应用前景。……
工业机器人是机器人的一个重要分支,它的特点是可通过编程完成各种预期的作业任务,在构造和性能上兼有人和机器人各自的优点,尤其是体现了人的智能和适应性,机器作业的准确性和在各种环境中完成作业的能力。因而在国民经济各个领域中具有广阔的应用前景。
机器人技术涉及力学、机械学、电气液压技术、自控技术、传感技术和计算机等学科领域,是一门跨学科综合技术。而机器人机构学乃是机器人的主要基础理论和关键技术,也是现代机械原理研究的主要内容。
工业机器人是一种能自动控制并可重新编程予以变动的多功能机器。它有多个自由度,可用来搬运物料、零件和握持工具,以完成各种不同的作业。
1、工业机器人的组成

工业机器人通常由执行机构、驱动-传动系统、控制系统及智能系统部分组成。
2、机器人各部分关系
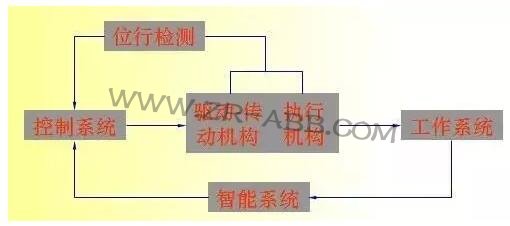
3、机器人各部分功能
执行机构:是机器人赖以完成各种作业的主体部分。通常为开式空间连杆机构。
驱动-传动机构:由驱动器和传动机构组成。传动有机械式、电气式、液压式、气动式和复合式等。而驱动器有步进电机、伺服电机、液压马达和液压缸等。
控制系统:一般由示教操作盘或控制计算机和伺服控制装置组成。前者作用是发出指令协调各有关驱动器之间的运动,同时要完成编程、示教/再现以及和其它环境状况(传感器信号)、工艺要求。外部相关设备之间的信息传递和协调工作。而后者是控制各关节驱动器使各杆能按预定运动规律运动。
智能系统:则由感知系统和分析决策系统组成,它分别由传感器及软件来实现。
4、机器人操作机
工业机器人的机械结构部分称为操作机。它由机座、腰部、大臂、小臂、腕部及手部组成。即由手臂机构和手腕机构组成。
5、工业机器人的发展过程
第一代为示教/再现型机器人。它主要由机械系统和控制系统组成。当前工业中应用最多。
第二代机器人为感觉型机器人。如有力觉、触觉和视觉等,它具有对某些外界信号进行反馈调整的能力。目前已进入应用阶段。
第三代为智能型机器人。其尚处于完全研究阶段。
6、操作机的主要类型:直角坐标型;圆柱坐标型;球坐标型;关节型。
7、操作机的主要技术指标
(1)自由度
自由度为用来确定手部相对机座的位置和姿态的独立参数的数目,它等于操作机独立驱动的关节数目。由下式来计算。
自由度是反映操作机的通用性和适应性的一项重要指标。目前一般通用工业机器人大多为 5 自由度左右,已能满足多种作业的要求
。
(2)工作空间
即操作机的工作范围。
(3)灵活度
灵活度是指操作机末端执行器在工作(如抓取物件)时,所能采取的姿态的多少。若能从各个方位抓取物体,则其灵活度最大;若只能从一个方位抓取物体,则其灵活度最小。
8、操作机位置与姿态的确定
(1)操作机位置和姿态的描述
构件的空间位置和姿态是用该构件的位置列阵rij和姿态矩阵Rij来描述,或用该构件的位置矩阵Mij来描述。
(2)两杆间的位置矩阵
杆i相对与杆i-1的位姿矩阵Mi-1,i,即为坐标系i相对于坐标系i-1的变换矩阵,此法称为D-H法。
9、操作机位置方程建立及求解
(1)操作机位姿方程的建立
操作机i的位姿矩阵方程为:M0i=M01M02…Mi-1,i,即为操作机的运动方程。
(2)操作机位姿方程的求解
机器人操作机末端执行器的位姿分析有两类基本问题:
1)位姿方程的正解
已知各关节的运动参数,求末端执行器相对参考坐标系的位置和姿态。
2)位姿方程的逆解
根据已给定的满足工作要求的末端执行器相对参考坐标系的位置和姿态,求各关节的运动参数。
这是对机器进行控制的关键,因此只有使各关节按逆解中求得的运动,才能使末端执行器获得所需的位置和姿态。
10、工业机器人操作机构的设计
工业机器人操作机是由机座、手臂、手腕及末端执行器等组成的机械装置。而从机器人完成作业的方式来看,操作机个是由手臂机构、手腕机构及末端执行器等组成的机构。其结构方案及其运动设计是整个机器人设计的关键。
(1)操作机手臂机构的设计
手臂机构一般为2~3个自由度,要求可实现回转、仰俯、升降或伸缩三种运动形式。手臂机构设计时,先要确定其结构型式和尺寸,还需考虑各种构件的重量对其运动速度、精度及刚度的影响。
(2)操作机手腕机构的设计
手腕机构一般为1~3个自由度,要求可实现回转、偏摆或摆转和仰俯三种运动形式。
手腕机构的设计时,要确定其结构型式及持续尺寸,并要注意诱导运动。为使其机构紧凑,要减少其重量和体积,以利于驱动传动的布置和提高手腕动作的精确性。
(3)末端执行器的设计
根据不同作业任务的要求,先确定其类型和机构形式,并尽可能使其类型和机构形式,尽可能使其结构简单、紧凑、重量轻,以减轻手臂的负载。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > 机器人资讯 >
首页 > 机器人资讯 > 

