简介:Lexium 05 功能概览,Lexium 05 伺服驱动器提供相当多的功能,使它能够在非常广泛的工业场合中应用。……
ABB机器人M2000 伺服驱动器提供相当多的功能,使它能够在非常广泛的工业场合中应用。
这两个功能家族是:
传统调试功能,如:
原点回归,
在操作人员控制下移动(手动模式),
伺服驱动器-伺服电机组合的自动调谐。
操作模式:
位置控制:
- 点到点模式,
- 电子齿轮模式。
速度控制:
- 带位置控制的速度控制,
- 直接速度控制。
转矩控制:
- 电流控制。
可以有两种控制模式:
本地控制模式
网络控制模式
本地控制模式下,伺服驱动器参数可以通过集成显示终端,远程终端或PowerSuite软件定义。运动由模拟信号(± 10 V)或RS422形式信号(脉冲/方向或A/B编码器信号)决定。 这种模式下,行程开关和原点传感器输入不由伺服驱动器管理。
原点回归
绝对坐标下,从一个点移动到另一个点之前,必须执行原点回归操作程序。 原点回归程序在于将轴位置值与已知的机械位置相关联。此位置成为以后轴运动的参考位置。
原点回归可以通过直接把轴的实际位置写入寄存器,或通过一系列到原点传感器的运动执行。
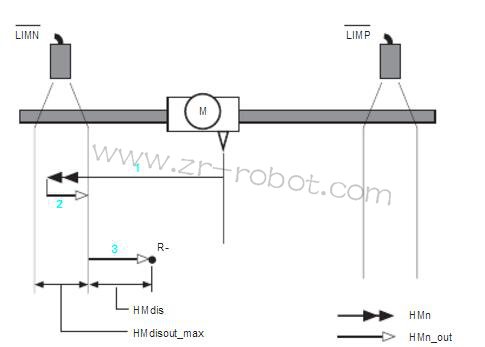
运动到位置传感器的原点回归
控制器支持4种形式的运动到位置传感器的原点回归程序:
原点回归到负限位开关,“LIMN”。
原点回归到正限位开关,“LIMP”。
原点回归到参考开关“REF” ,第一次沿负方向移动。
原点回归到参考开关“REF”,第一次沿正方向移动。
原点回归程序的执行可以考虑或不考虑编码器索引脉冲。
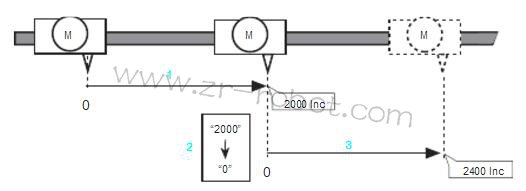
强制原点回归
强制原点回归即直接设定当前电机位置为新参考点,所有以后的定位数据参考此点
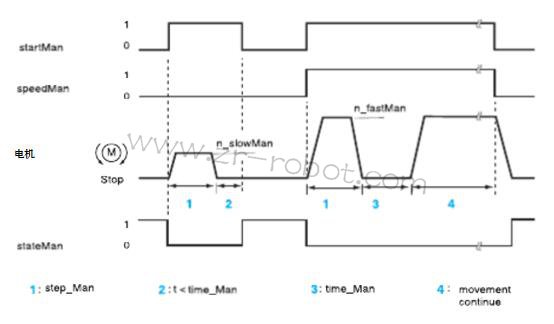
手动模式
这种模式下轴可以在操作者的控制下直接运动。
电机来回运动一个路径单元或以恒定速度连续运动。有两种运动速度可选(慢或快)。多种参数允许完全通过手动模式指定。
设定点值
参数可以通过通讯网络, PowerSuite软件或伺服驱动器集成的显示终端传送。
采用手动模式移动轴。
作为控制位“startMan”上升的结果,会以低速或高速运动到一个定义好的距离(1),速度取决于第二控制位。
如果“startMan”控制位保持激活超过一个定义时间“timeMan” - 事例 3 -,运动重新开始并持续进行 (4), 在操作者的监视下,直到“startMan”位返回非激活状态。一个“stateMan”位反映当前电机状态-准备移动/旋转中-当伺服驱动器在手动模式下控制时。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB驱动模块维修 >
首页 > ABB驱动模块维修 >