简介:ABB机器人轴数据丢失原因分析: 机器人维修,无换枪盘机器人: ① 机器人编码器线缆虚接、HARTING 头松动,导致轴数据丢失 ② 机器人管线包内部线缆问 题,导致机器人数据丢失有换枪盘机器人: ① 机器人信号模块有灰尘,导致机器人轴数据丢失 ② 机器人在抓……
① 机器人编码器线缆虚接、HARTING 头松动,导致轴数据丢失
② 机器人管线包内部线缆问 题,导致机器人数据丢失有换枪盘机器人:
① 机器人信号模块有灰尘,导致机器人轴数据丢失
② 机器人在抓取焊枪时换枪盘贴合问题(信号模块插针有烧蚀现象),导致信号模块接触不良机器人轴数据丢失
③ 机器人焊枪侧编码器线缆接头虚接或电缆损坏,导致轴数据丢失
④ 机器人管线包内部线缆问题,导致机器人轴数据丢失
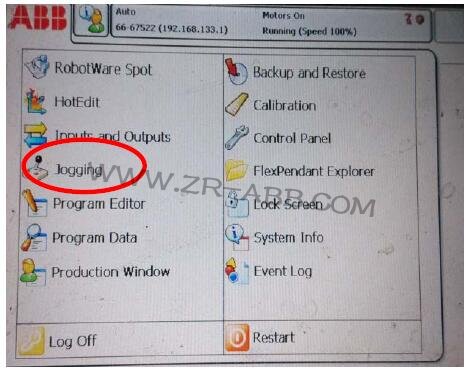
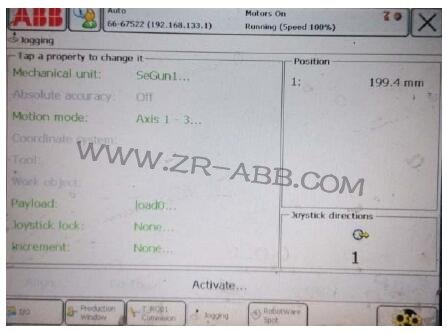
第一步:示教器ABB 菜单下选择Jogging
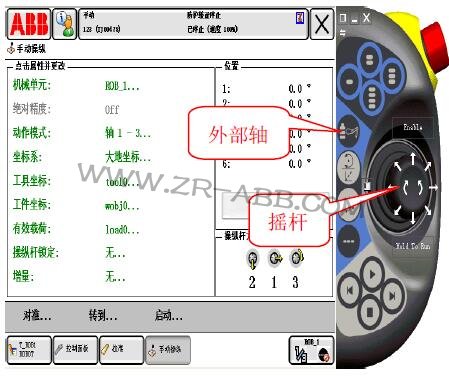
第二步:选择外部轴,摇动摇杆,使动电极臂电极帽与静电极臂电极帽贴合;
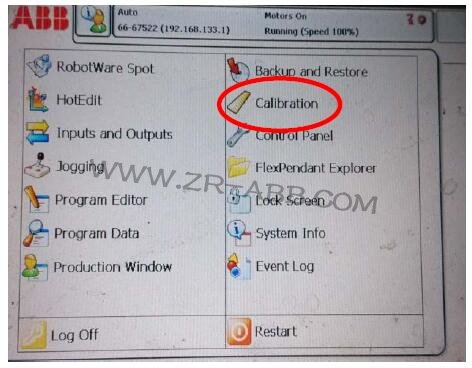
第三步:选择标定选项Calibration,进入标定界面
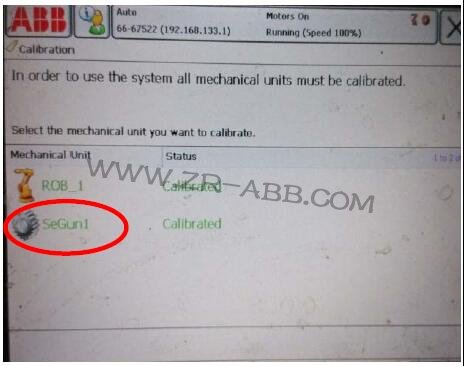
第四步:选择伺服焊钳标定Segun1
第五步:选择更新转数计数器

第六步:更新完成后,再次进入到操作界面,手动将焊枪电极臂与静电极臂分开;
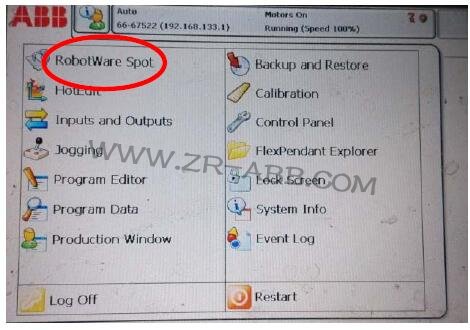
第七步:进入机器人RobotWare Spot 界面
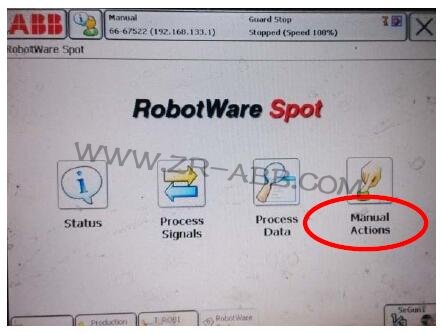
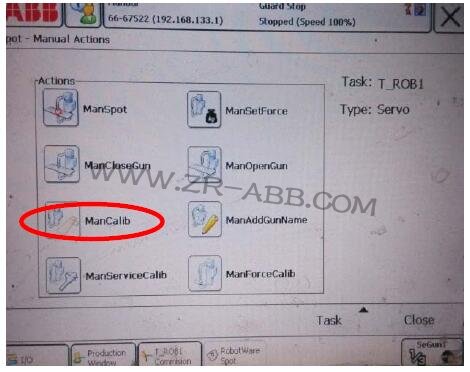
第八步:选择Manual Actions 界面
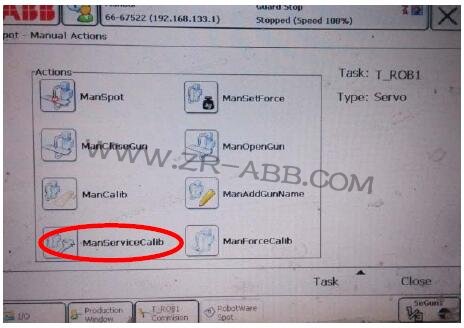
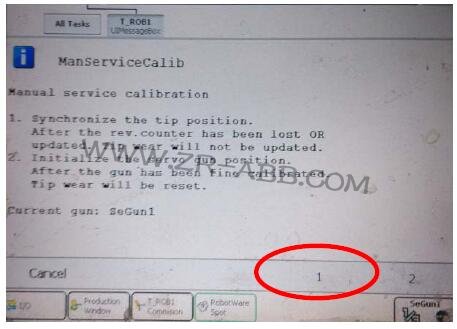
第九步:选择ManServiceCalib(必须在伺服电源启动的情况下,方可进入此界面)
第十步:选择按键1 进行操作
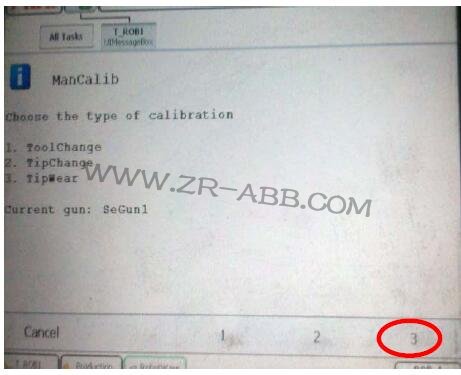
第十一步:选择ManCalib,
第十二步:选择按键3 进行操作,操作完成后将机器人手动回原点位置
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB机器人维修 >
首页 > ABB机器人维修 > 

