简介:一、程序储存器(Programmemory)的组成: 应用程序(Program) 系统模块(Systemmodules) 机器人程序储存器中,只允许存在一个主程序;所有例行程序与数据无论存在于哪个模块,全部被系统共享;所有例行程序与数据除特殊定义外,名称必须是唯一的。 1、应用程序(……
一、程序储存器(Programmemory)的组成:
应用程序(Program)
系统模块(Systemmodules)
机器人程序储存器中,只允许存在一个主程序;所有例行程序与数据无论存在于哪个模块,全部被系统共享;所有例行程序与数据除特殊定义外,名称必须是唯一的。
1、应用程序(Program)的组成:
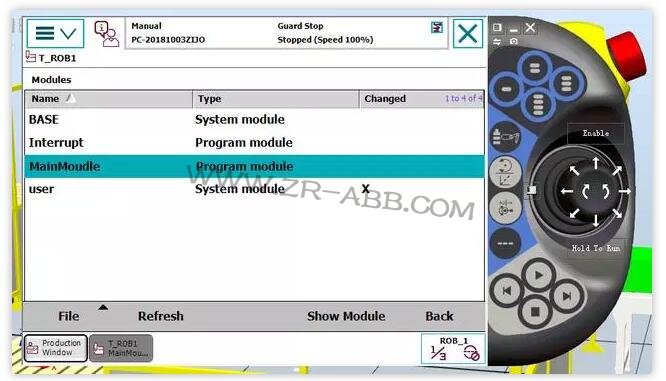
·主模块(Mainmodule)主程序(Mainroutine)程序数据(Programdata)例行程序(Routines)
·程序模块(Programmodules)程序数据(Programdata)例行程序(Routines)
2、系统模块(Systemmodules)的组成:
·系统数据(Systemdata)
·例行程序(Routines)
所有
ABB机器人都自带两个系统模块,USER模块与BASE模块,根据机器人应用不同,有些机器人会配备相应应用的系统模块。建议不要对任何自动生成的系统模块进行修改。
二、编程窗口:
1、菜单键File:
1、Open:打开一个现有文件。(程序.prg或模块.mod)
2、New:新建一个程序。
3、Saveprogram:存储更改后的现有程序。
4、Saveprogramas:存储一个新程序。
5、Print:打印程序,现已经不使用。
6、Preferences:定义用户化指令集。
7、Checkprogram:检验程序,光标会提示错误。
8、Close:在程序储存器中关闭程序。
9、Savemodule:存储更改后的现有模块。(只在Module窗口中存在)
10、Savemoduleas:存储一个新模块。(只在Module窗口中存在)
2、菜单键Edit:
1、Cut:剪切,可能会丢失指令或数据。
2、Copy:复制。
3、Paste:粘贴,将剪切或复制的指令或数据粘贴到相应位置。
4、GotoTop:将光标移至顶端。
5、GotoBottom:将光标移至底端。
6、Mark:定义一块,涂黑部分。
7、ChangeSelected:修改指令中数据,可直接将光标移至相应位置按回车键。
8、Showvalue:输入数据,可直接将光标移至相应数据按回车键。
9、Modpos:修改机器人位置,功能键上有。
10、Search:寻找指令,程序复杂时很有用。
11、功能键:Copy、Paste、Modpos在菜单键Edit中可以找到。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB机器人维修 >
首页 > ABB机器人维修 > 

