简介:ABB机器人示教盒维修按钮功能介绍: FlexPendant 设备(有时也称为 TPU 或教导器单元)用于处理与机器人系统操作相关的许多功能: 运行程序;微动控制操纵器;修改机器人程序等。使能器的上的三级按钮(默认不按为一级不得电、按一下为二级得电、按到底为三……
FlexPendant 设备(有时也称为 TPU 或教导器单元)用于处理与机器人系统操作相关的许多功能: 运行程序;微动控制操纵器;修改机器人程序等。使能器的上的三级按钮(默认不按为一级不得电、按一下为二级得电、按到底为三级不得电)。
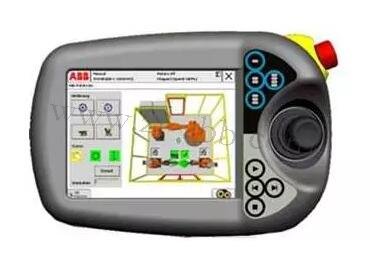
A 连接器、B 触摸屏、C 紧急停止按钮、D 使动装置、E 控制杆
基本窗口
初始窗口、Jogging窗口、输入/输出(I/O窗口)、QuicksetMenu(快捷菜单)、特殊工作窗口
初始界面
A ABB菜单、B 操作员窗口、C 状态栏、D 关闭按钮、E 任务栏、F " 快速设置"菜单
坐标系统(和KUKA的一样)
Tools coordinates 工具坐标系、Base coordinates 基本坐标系、Worldcoordinates 大地坐标系、Work Object 工件坐标系。
手动操作机器人
坐标系以及运动模式
A:超驰微动控制速度设置(当前选定 100%)
B:坐标系设置(当前选定大地坐标)
C:运动模式设置(当前选定轴 1-3 运动模式)
在选择了坐标系和运动方式的前提下,按住使能键通过操纵杆进行操作,每次选择只能针对三个方向。
快捷菜单详细介绍
工具坐标系:工具的建立及TCP 的较验
TCP中心
A tool0 的工具中心点,TCP
操作:
1. 在 ABB 菜单中,点击微动控制。
2. 点击工具,显示可用工具列表。
3. 点击 新建... 以创建新工具。
4. 点击确定。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB示教器维修 >
首页 > ABB示教器维修 > 

