简介:ABB机器人示教器功能: 1、功能显示 Emergencystopbutton(E-Stop):急停开关。 Enablingdevice:使能器。 Joystick:操纵杆。 Display:显示屏。 2、窗口键: Jogging -操纵窗口手动状态下,用来操纵机器人。显示屏上显示机器人相对位置及当前座标系。 rogram-编……
1、功能显示
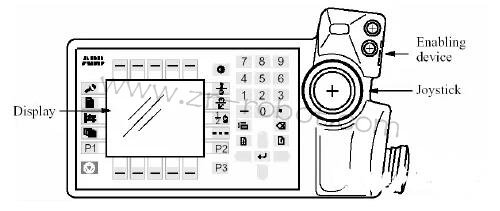
Emergencystopbutton(E-Stop):急停开关。
Enablingdevice:使能器。
Joystick:操纵杆。
Display:显示屏。
2、窗口键:
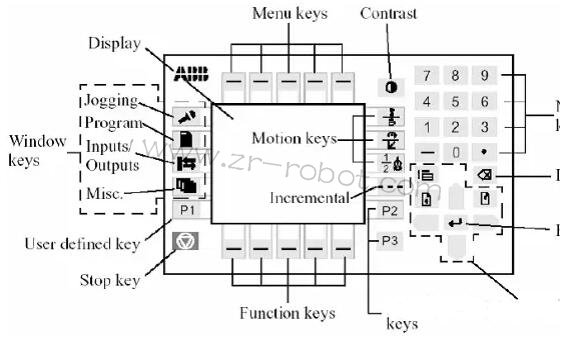
Jogging -操纵窗口手动状态下,用来操纵机器人。显示屏上显示机器人相对位置及当前座标系。
rogram-编程窗口手动状态下,用来编程与测试。所有编程工作都在编程窗口中完成。
Input/Outputs-输入/输出窗口显示输入输出信号表与其数值。可手动给输出信号赋值。
Misc.-其他窗口:包括系统参数、服务、生产以及文件管理窗口。
3、导航键:
List -切换键将光标在窗口的几个部分间切换。(通常由双实线分隔
extPage-向下翻页键将光标向下快速移动。
reviousPage-向上翻页键将光标向上快速移动。
Uparrows-光标上移键将光标向上单步移动。
Downarrows-光标下移键将光标向下单步移动。
Leftarrows-光标左移键将光标向左单步移动。
Rightarrows-光标右移键将光标向左单步移动。
4、运动控制键:
MotionUnit-运动单元切换键手动状态下,操纵机器人本体与机器所控制的其他机械装置(外轴)之间的切换。
MotionType1-运动模式切换键1直线运动与姿态运动切换键。
直线运动是指机器人TCP沿座标系X、Y、Z轴方向作直线运动。
姿态运动是指机器人TCP在座标系中X、Y、Z轴数值不变,只沿着X、Y、Z轴旋转,改变姿态。
MotionType2-运动模式切换键2单轴运动选择键。
第一组:1、2、3轴
第二组:4、5、6轴
Incremental-点动操纵键
启动或关闭点动操纵功能,从而控制机器人手动运行时速度。
5、其他键:
top-停止键停止机器人程序运行。
Contrast-光亮键调节显示器对比度。
MenuKeys-菜单键显示下拉式菜单(热键),共有五个菜单键,显示包含各种命令的菜单。
Functionkeys-功能键直接选择功能(热键),共有五个功能键,直接选择各种命令。
Delete-删除键删除显示屏所选数据,机器人操作时,所要删除任何数据、文件、目录等,都用此键。
Enter-回车键进入光标所示数据。
6、自定义键:
P1-P5这五个自定义键的功能可由程序员自定义,每个键可以控制一个模拟输入信号或一个输出信号以及其端口。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB示教器维修 >
首页 > ABB示教器维修 > 

