简介:ABB机器人维修,手动操作机器人 手动操作机器人: 1、操纵窗口切换: 将机器人操作模式选择器置于手动限速模式。 切换至操纵窗口。 2运动控制键: (1)运动单元切换键: ExternalUnit-外轴运动单元Robot-机器人 光标指向机器人,操纵杆操纵机器人本体运动。……
手动操作机器人:
1、操纵窗口切换:
将机器人操作模式选择器置于手动限速模式。
切换至操纵窗口。
2运动控制键:
(1)运动单元切换键:
ExternalUnit-外轴运动单元Robot-机器人
光标指向机器人,操纵杆操纵机器人本体运动。
光标指向外轴,操纵杆操纵外轴,一台机器人最多可控制六个外轴。
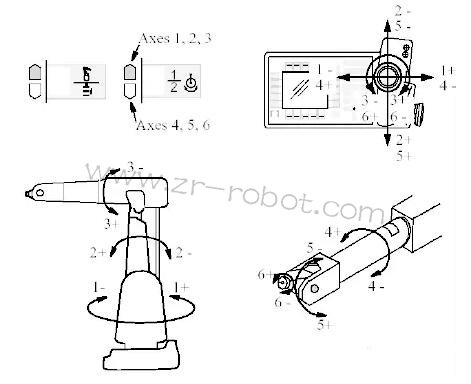
(2)运动模式切换键:
Linear-直线运动
ABB机器人工具姿态不变,机器人TCP沿座标轴线性移动。
选择不同坐标系,机器人移动方向将改变。
Reorientation-姿态运动
工业机器人TCP位置不变,机器人工具沿座标轴转动,改变姿态。
Axes-单轴运动
Axes1,2,3-第一、二、三轴
3座标系设定:
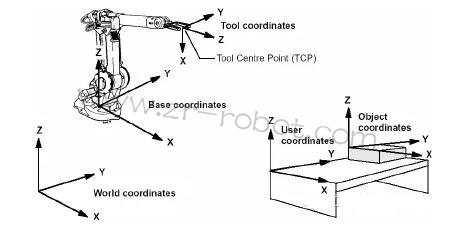
(1)座标系种类:
|
Worldcoordinates
|
大地座标系
|
|
|
Basecoordinates
|
基础座标系
|
|
|
Toolcoordinates
|
工具座标系
|
|
|
Workobjectcoordinates
|
工件座标系
|
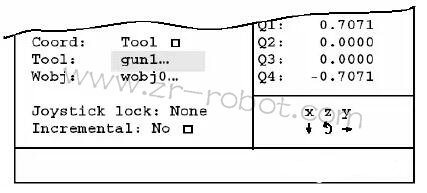
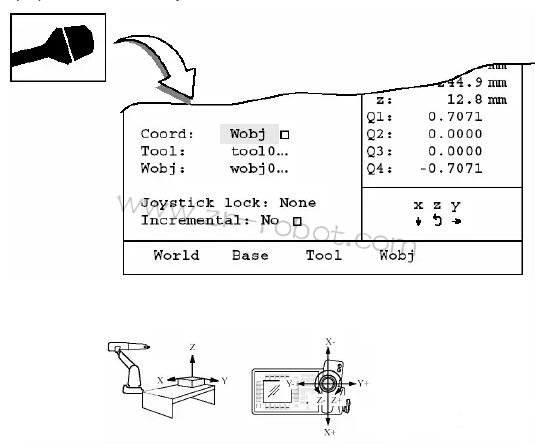
(2)座标系选择:
进入操纵窗口后,使用光标移动键将光标移至选项Coord,此时显示器下端功能键上将显示World、Base、Tool、Wobj四种选项,按相应功能键选择座标系。
(3)工具选择:
进入操纵窗口后,使用光标移动键将光标移至选项Tool,按回车键,此时显示器显示机器人系统内工具清单,使用光标移动键将光标移至相应的工具,通过功能键OK选择。
(4)工件座标系选择:
光标移至选项Wobj,按回车键,显示器显示工件座标系清单,将光标移至相应的工件座标系,通过功能键OK选择。只有机器人座标系Coord选择Wobj时,此项选择才起作用。
4、操纵杆锁定选择:
进入操纵窗口后,使用光标移动键将光标移至选项Joysticklock,此时显示器下端功能键上将显示None与三种箭头共四种选项,按相应功能键选择锁定机器人操纵杆前后、左右与旋转。
5、点动速度选择:
使用光标移动键将光标移至选项Incremental,显示器下端功能键上显示None、SmallMedium、Large与User四种选项,按相应功能键选择相应速度。用点动操纵键可以快速控制点动速度打开或关闭。当机器人处于点动状态时,每动一下摇杆,机器人移动一步,摇杆倾斜超过1秒钟后,机器人以每秒10步的速度连续移动,直到摇杆复位。
No(Normal) 正常状态,连续移动。
Small 小,每单元移动0.05mm或0.005度。
Medium 中,每单元移动1mm或0.02度。
Large 大,每单元移动5mm或0.2度。
User 用户自定义点动速度。
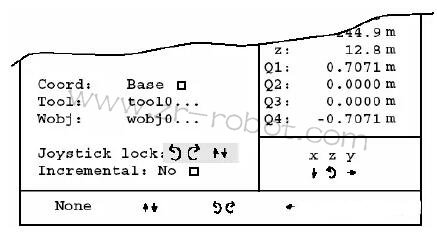
6、机器人当前位置显示:
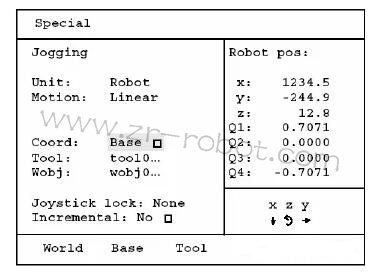
进入操纵窗口后,在显示屏右侧Robotpos会显示机器人当前位置。
当机器人运动模式为直线运动或姿态运动时,显示屏显示机器人当前X、Y、Z座标值与空间姿态值Q1、Q2、Q3、Q4。根据基座标系、机器人工具TCP或工件座标系的不同选择,数值会发生变化。
当机器人运动模式为单轴运动时,显示屏显示机器人当前每个轴的转角偏差。
7、使能器:
自动模式下,使能器无效。
手动模式下,使能器有三个位置。
起始为“0”,机器人电机不上电。
中间为“1”,机器人电机能上电。
最终为“0”,机器人电机不上电,必须回到起始状态才能再次使电机上电。
8、直线运动:
运动方式设置:
(1)操纵机器人沿Base座标系的方向移动:

(2)操纵机器人沿Tool座标系的方向移动:
(3)操纵机器人沿Wobj座标系的方向移动:
(4)操纵机器人沿World座标系的方向移动:
9、姿态运动:
运动方式设置:
机器人将以如图所示方式绕选定工具的中心点(TCP)旋转。
10、单轴运动:
11、外轴运动:
运动方式设置:
进入操纵窗口,按运动单元切换键至外轴运动,此时显示屏在功能键处显示所有可控制的外轴名称。按功能键选择要操纵的外轴单元。如果系统有超过5个外轴,按回车键,功能键上可显示其他的外轴。一般情况下,外轴采用单轴运动方式。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB示教器维修 >
首页 > ABB示教器维修 > 

