简介:1)机器人需要有888-2(使用控制器网口) 2)此处举例888选项 3)机器人控制器有如下网口,其中 X2 是服务端口,ip固定 X3连接了示教器 X7连接了安全板 X9连接了轴计算机 4)Profinet可以连接WAN口或者LAN3口,根据设置连接 5)此处举例连接WAN口 6)控制面……
1)机器人需要有888-2(使用控制器网口)
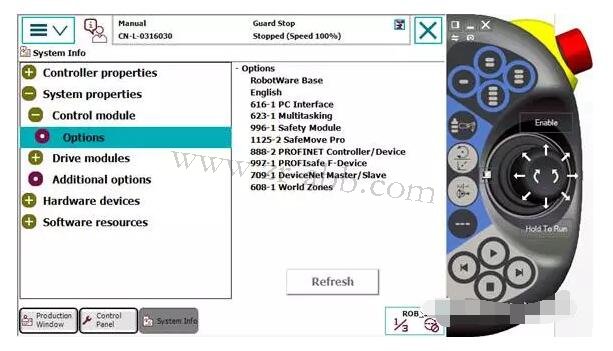
2)此处举例888选项
3)机器人控制器有如下网口,其中
X2 是服务端口,ip固定
X3连接了示教器
X7连接了安全板
X9连接了轴计算机
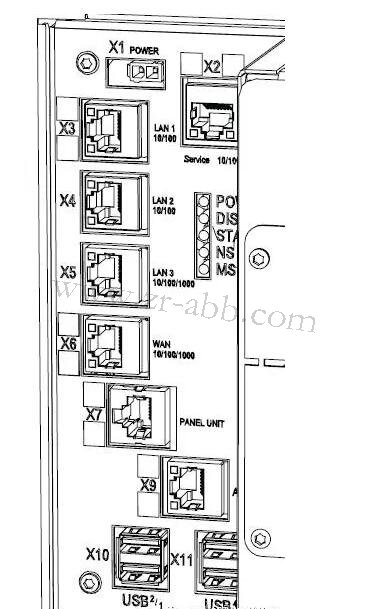
4)Profinet可以连接WAN口或者LAN3口,根据设置连接
5)此处举例连接WAN口
6)控制面板,配置,主题选择communication
7)进入IPSETTING
8)点击ProfinetNetwork
9)修改ip并选择对应网口
9)重启
使用PROFINET CONFIGURATOR配置
1)机器人配置Profinet主站需要用到专门软件
2)可以下载:
3)解压之后,
4)打开软件
5)点击保存,修改配置文件名称,结果如下
6)在左下角区域,右击,导入设备GSD文件
机器人PROFINET GSD文件可以从如下获得
打开robotstudio,ADDIN,找到对应版本robotware,右击进入如下路径…\ABB.RobotWare-6.06.1025\RobotPackages\RobotWare_RPK_6.06.1025\utility\service\GSDML
7)选中左侧PN_TEST节点,点击左下角,选中
ABB机器人主站配置文件,并双击加入
8)选中左边树的节点,修改右边station名,ip等,设备名要和后期机器人里设置的station名一致,ip和机器人设的profinet ip 一致
9) 点击左边最上面节点,设置profinet 网络,起始ip,结束ip等
10) 总线结构处选择PROFINET网络,双击左下角需要添加的从站设备
11) 设置从站设备网络信息。选中左侧节点,修改右侧device信息,Station名要和device机器人中的station名一致
备的输入输出,选择左侧节点,双击右侧DI 64byte节点
输出。选择左侧DI 64byte节点,双击右侧DO 64byte
14)同理继续添加其他设备
15)完成添加,选中PROFINET节点,检查,参数化,生成IPPINO.xml文件(路径为这个项目保存位置)
16)复制IPPINO.Xml文件到机器人的home文件夹
17)建议同时把生成的*.bcp文件保存至机器人。后续要修改编辑该项目工程,需要打开对应bcp
再次进入机器人示教器设置
1 进入机器人示教器,控制面板-配置-主题IO-INDUSTRY NETWORK,找到PROFINET
2 设置如下:Configuration File填写IPPNIO.xml(即之前放到HOME 文件夹下的IPPNIO.xml)
Station Name设置成和配置软件里主站名字一样
3 在配置界面,找到Profinet device,添加
Name为主站里显示的从站名字,StationName为配置文件里从站的名字(这个名字必须和配置文件,从站机器人设置的stationName一样)
修改输入输出字节数
4 创建signal,方法同常规,设备选择刚创建的pn_robot_slave
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB机器人维修 >
首页 > ABB机器人维修 > 

