简介:单工位多次预约程序 1)ABB机器人有程序如下。 2) 3)工艺过程如下: ABB机器人在home等待。有人按过di信号,机器人开始执行。人工可以一次性多次预约,即如果人工一次性按过3次,机器人执行三次4)我们通过中断来实现。 5)中断的意义为,机器人后台在不断……
单工位多次预约程序
2)
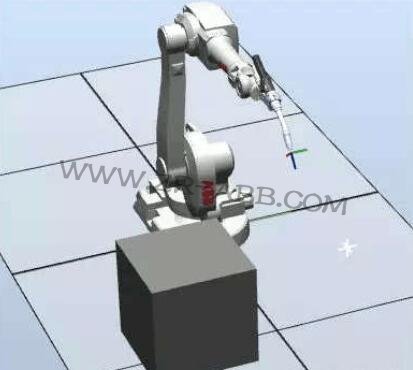
3)工艺过程如下:
ABB机器人在home等待。有人按过di信号,机器人开始执行。人工可以一次性多次预约,即如果人工一次性按过3次,机器人执行三次4)我们通过中断来实现。
5)中断的意义为,机器人后台在不断扫描(类似PLC),和机器人前台运动不冲突。后台实时扫描到信号就会去执行设定的中断程序,中断程序里没有运动指令,前台机器人不停,不影响运动
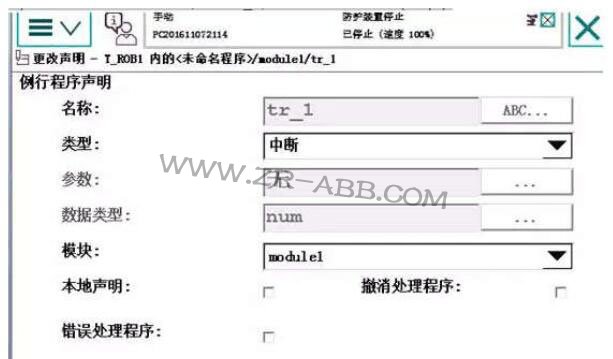
6)新建一个例行程序,取名tr_1,注意:类型选中断(trap)
7)进入中断程序,插入指令如下,即当机器人执行中断程序时,给reg1记录次数加1

8)进入主程序,设置中断及对应的io信号
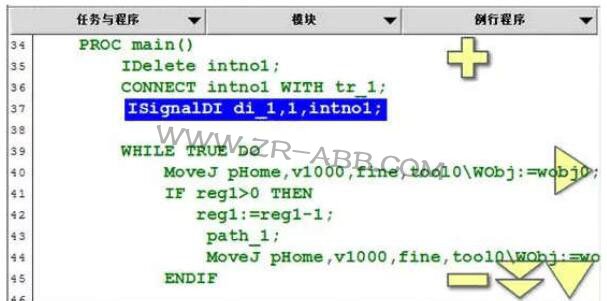
37行的意思是,任何时候di_1信号0变1,就会触发执行tr-1中断程序,即置flag1为true
35-37行程序只要运行过一遍即可,类似于设置开关,不需要反复运行
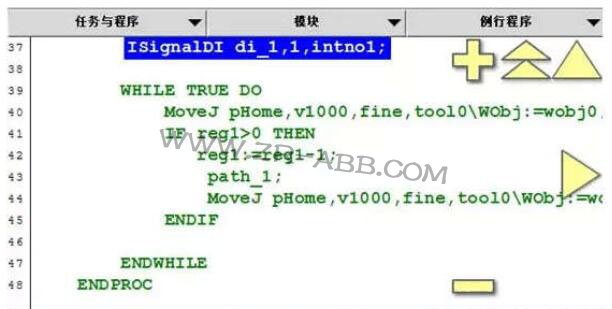
9)主要程序如下。即如果reg1=0,机器人在home等待
3.在robotstudio 创建两台机器人的socket连接1)什么是socket 通讯?
就是TCP/IP通讯,无协议,在微软环境下称为socket
2)socket 通讯能干什么?
可以收发制定的数据,包括sting字符串,byte 数组等
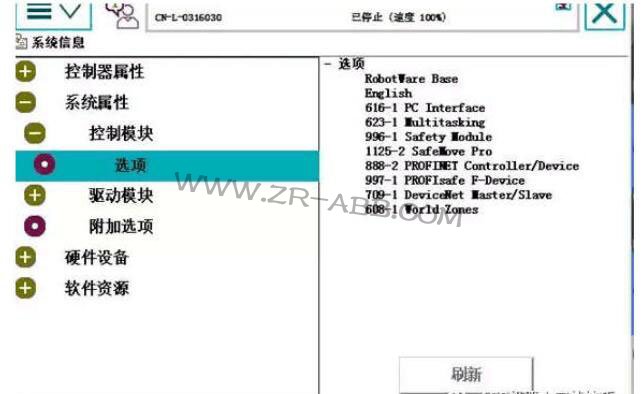
3)创建 socket 机器人需要什么选项?
ABB机器人需要616-1PC-INTERFACE选项
4)socket 通讯网线插哪个网口?
Service口(IP固定:192.168.125.1)或者Wan口都可以,(可以自己设置)
5)创建c1ient端的实例
通常机器人和相机通讯,机器人作为client端。
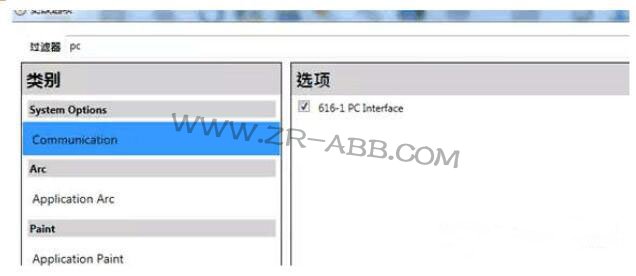
1)新建一个机器人系统,注意建立系统时加入pc-interface 选项
2)为了避免之前的连接没有关闭,先插入socketclose指令,后面的socket1为自己新建的socketdev类型的变量

3)之后插入创建连接socketCreate
4)插入建立连接SocketConnect,后面需要制定Server的ip和端口,如果是在电脑和另一台虚拟控制器连接,ip设为“127.0.0.1”,端口自定义,建议不要用默认的1025.
这一步作用为机器人会和server建立连接,如果没有建立成功会一直等待,如果成功则往下执行

5)此处做测试,在建立成功后,插入TPWrite 指令,可以在示教器看到 socketclinent connect successful
6)接下去可以收发数据,此处示例为client 先发送数据给 server,再接受server发送回来的数据
7)SocketSend后面可以发送string 或者byte数组,具体可以选择不同可选变量
8)发送完毕后,client 接受到server 发回的数据并写屏
6)以下为server 端示例
1)重新创建一个工作站,创建时不要忘记添加 pcinterface选项
2)作为server,机器人需要创建2个socketdev变量
3)为了避免之前的连接没有关闭,同样建议先 socketclose
4)
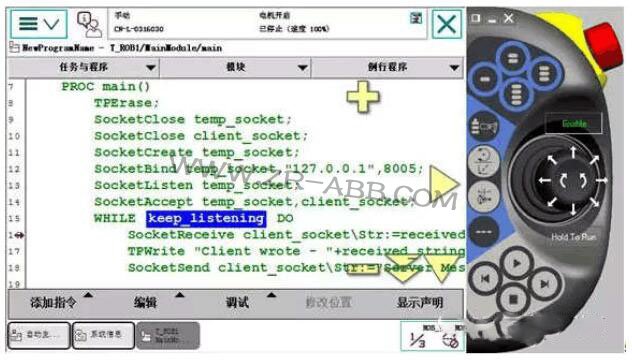
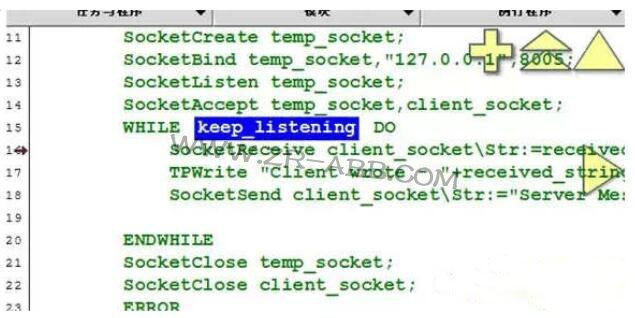
5)接着创建 socketCreatetemp_socket 服务器端 socketdev
6)SocketBind为绑定socket 要监控的ip和端口,如果是虚拟仿真,ip为127.0.0.1,端口自定义(和client 端设置一致)
7)SocketListen为机器人server 监听是否有client连接
8)socketAccept为接受client的连接
9)建立连接后,机器人就可以执行死循环,即一直处于收发状态
10)之前client程序为client 先发后收,故这里server先收后发
7)client 和server 都写完后,可以运行,注意先运行server 端,即server机器人处于监听状态,如果连上,两台相互通讯,效果如下
8)server 机器人收到的讯息如下:
9)client机器人收到的讯息如下:
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB机器人维修 >
首页 > ABB机器人维修 > 

