简介:机器人示教系统的原理、分类及特点 ABB示教器维修,针对现代工业快速多变以及日益增长的复杂性要求,继柔性制造、计算机集成制造、精良生产及并行工程,在而向未来工业应用的生产单元中,机器人不仅被要求不知疲倦地进行简单重复工作.而且能作为一个高度柔性……
机器人示教系统的原理、分类及特点
ABB示教器维修,针对现代工业快速多变以及日益增长的复杂性要求,继柔性制造、计算机集成制造、精良生产及并行工程,在而向未来工业应用的生产单元中,机器人不仅被要求“不知疲倦”地进行简单重复工作.而且能作为一个高度柔性、开放并几有友好的人机交互功能的可编程、可爪构制造单元融合到制造业系统中,这一能力的实现要求现阶段机器人技术椎体的进步.示教技术就是其中爪要的一项。机器人因为能被编程完成不同的任务而被视为柔性的自动化设备“。通过某一设备或方式实现对机器人作业任务的编程,这个过程就是机器人的示教过程。
现有的机器人示教系统可以分为以下三类
(1)示教再现方式
广州子锐
ABB机器人:ABB示教再现(t eaching pla油ack),也称为直接示教,就是指我们通常所说的手把手示教,由人直接搬动机器人的手臂对机器人进行示教,如示教盒示教或操作杆示教等。在这种示教中,为了示教方便以及获取信息的快捷而准确,操作者可以选择在不同坐标系下示教,例如,可以选择在关节坐标系(Joint Coordinates)、直角坐标系(Reetan:ular Coordinate:)以及工j毛坐标系(Tool Coordinates)或用户坐标系(User Coordinates)卜进行示教。
ABB机器人示教再现是机器人普遍采用的编程方式.典型的示教过程是依靠操作员观察机器人及其夹持工具相对于作业对象的位姿,通过对示教盒的操作,反复调稚示教点处机器人的作业位姿、运动参数和工艺参数,然后将满足作业要求的这些数据记录下来,再转入下一点的示教。
在示教过程结束后,机器人实际运行时使用这些被记录的数据,经过插补运算,就可以再现在示教点上记录的机器人位置。
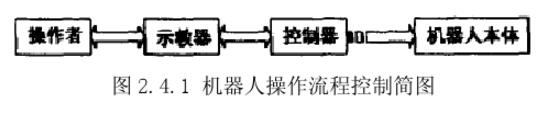
这个功能的用户接‘」是示教器键盘,操作证通过通过操作示教器,向主控计算机发送控制命令,操纵主控计算机上的软件,完成对机器人的控制:其次示教器将接收到的当前机器人运动和状态等信息通过液,l丙屏完成显示。示教器通过线缆与主控计算机相连。
在这种示教方式中,示教众是一个垂要的编程设备,一般具备直线、圆弧、关节插补以及能够分别在关节空间和笛卡尔空间实现对机器人的控制等功能。
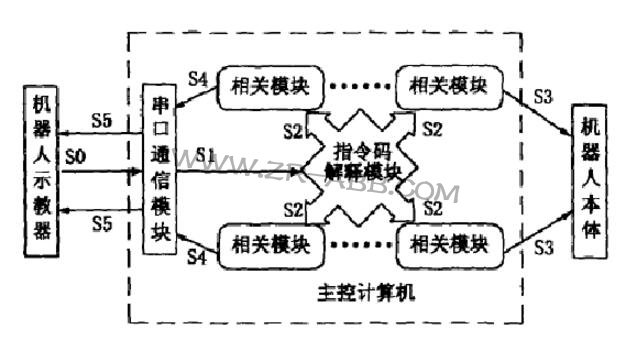
示教时,当用户按下示教键盘上的按键时,示教器通过线缆向主控计算机发出相应的指令代码(S0):此时,主控计算机上的主控模块中负责串口通信的通信子模块中的串日监视线程接收指令代码(51):然后由指令码解释模块分析判断该指令码,并进一步向相关校块发送与指令码相应的消息(S2);驭动有关校块完成该指令码要求的具体功能(S3),同时.为了让操作用户l付刻掌握机器人的运动位置和各种状态信息.主控计算机的有关校块同时将状态信息(S4)从串口发送给示教器(S5),在液晶显示屏上显示,从而与用户沟通.完成数据的交换功能。
在早期的示教再现系统中,还有一种人工牵引示教【2】一般是操作员直接牵引机器人沿作业路径运动一遍,对于难以直接牵引的大、中型功率液压机器人,这种方式并不合适于是又有人工模拟牵引示教,在牵引的过程中,由计算机对机器人各关节运动数据采样记录.得到作业路径数据.由于这些数据是各关节的数据.因此这种方法又被称为关节坐标示教法.这种示教方法的优点是控制简单,缺点是劳动强度人,操作技巧性高.精度不易保证。
如果示教失误,修正路径的唯一方法就是改新示教。
利用了机器人几有较高的重复定位精度优点.降低了系统误差对机器人运动绝对精度的影响,这也是目前机器人普遍采用这种示教方式的主要原因。
要求操作员只有相当的专业知识和熟练的操作技能,并需要现场近距离示教操作,因而具有一定的危险性,安全性较差
示教过程繁琐、费时,需要根据作业任务反复调整机器人的动作轨迹姿态与位置.时效性较差。
(2)离线编程方式
从于CAD/CAM的机器人离线编程示教.是利用计算机图形学的成染,建立起机器人及其工作环境的模型,使用某种机器人编程语言,通过对图形的操作和控制,离线计算和规划出机器人的作业轨迹.然后对编程的结果进行三维图形仿真,以检验编程的正确性【6]。最后在确认无误后.生成机器人可执行代码下载到机器人控制器中,用以控制机器人作业。根据使用编程语言的层次不同,离线编程又可分为执行级编程和任务级编程【7]。
(3)从于虚拟现实方式
随着计算机学及相关学科的发展,特别是机器人遥操作、虚拟现实、传感器信息处理等技术的进步为准确、安全、高效的机器人示教提供了新的思路,为用户提供一种崭新和谐的人机交互操作环境的虚拟现实技术(Virtual Reality,VR)出现和应用尤其吸引T众多机器人与自动化领域的学者的注意【9]。这里,虚拟现实作为高端的人机接rl.允许用户通过声、像、力以及图形等多种交互设备实时地与虚拟环境交互。根据用户的指挥或动作提示,示教或监控机器人进行复杂的作业【101。利用虚拟现实技术进行机器人示教是机器人学中新兴的研究方向。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB示教器维修 >
首页 > ABB示教器维修 >