简介:ABB关节机器人在码垛生产线运用的调试。可以指导电气安装调试人员在已有机器人程序模板的情况下如何正确、快速的调试机器人。内容包括机器人介绍、开关机、校准转数计数器、手动移动、自动启动、配置和查看I/O信号、码垛参数调整、备份与恢复等。 一、安装机……
ABB关节机器人在码垛生产线运用的调试。可以指导电气安装调试人员在已有机器人程序模板的情况下如何正确、快速的调试机器人。内容包括机器人介绍、开关机、校准转数计数器、手动移动、自动启动、配置和查看I/O信号、码垛参数调整、备份与恢复等。
一、安装机器人
安装前首先检查是否缺件,用眼观察机器人完好无损伤。。
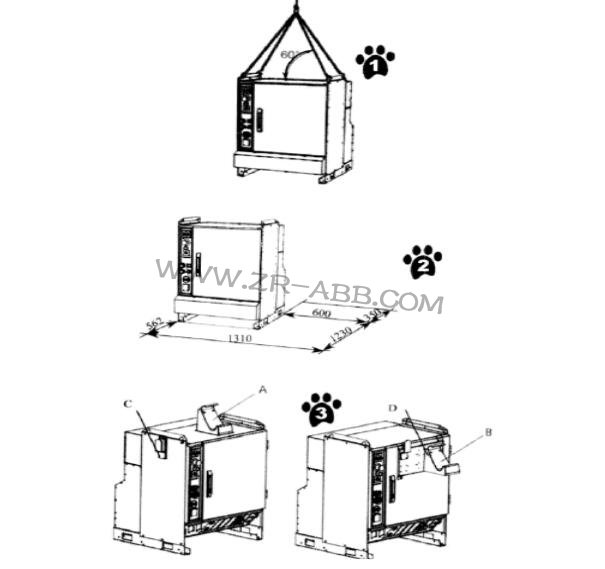
ABB机器人控制柜的安装
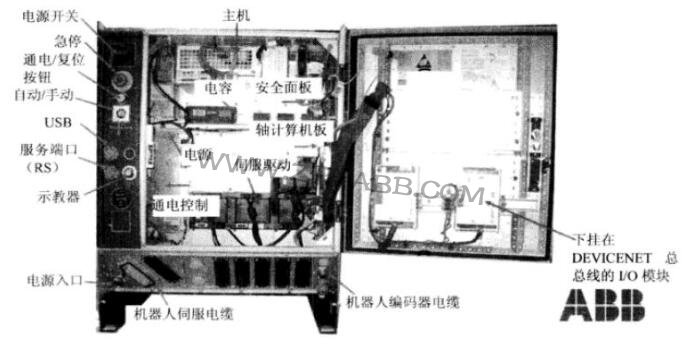
ABB机器人控制柜的构造
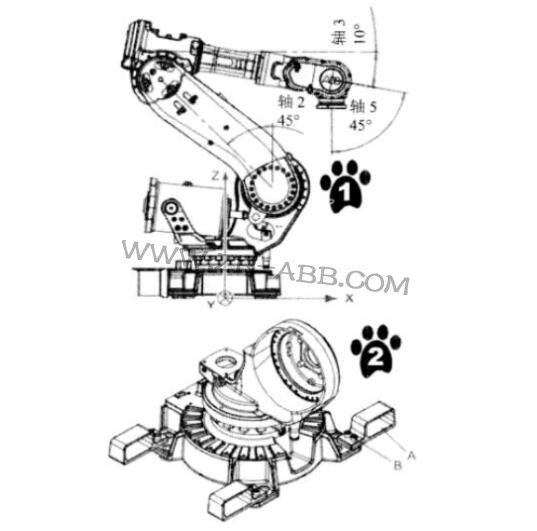
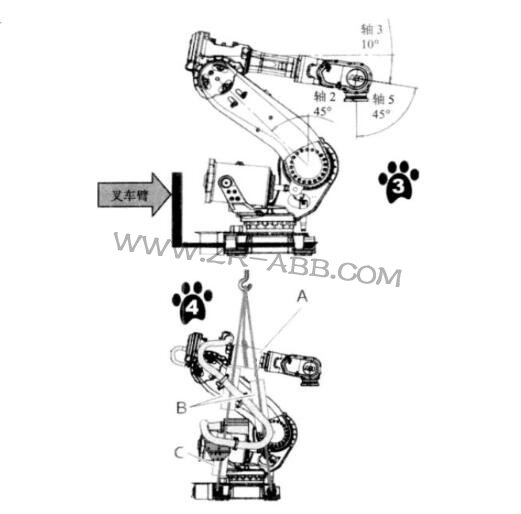
ABB机器人本体
可以使用叉车或者吊车进行吊装。若使用叉车,需要安装专用工具,如图2所示。图3为叉车吊装示意图,图4为吊车吊装示意图。
ABB机器人本体与控制柜的连接
下面以ABB机器人IRB6640为例,介绍本体与控制柜连接的操作:
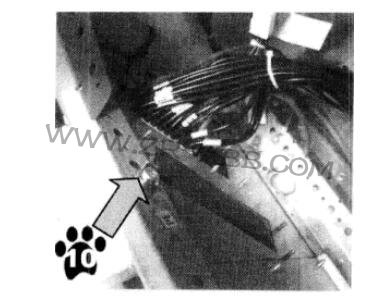
机器人与控制柜的连接主要是电动机动力电缆与转数计数器电缆、用户电缆的连接。
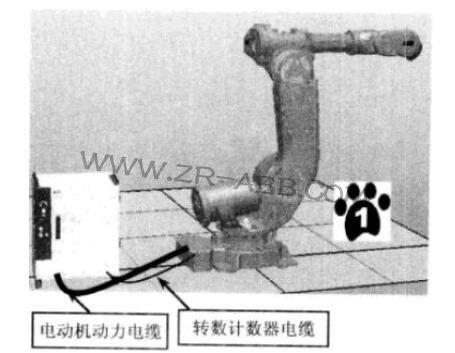
转数计数器电缆连接到机器人本体底座接口
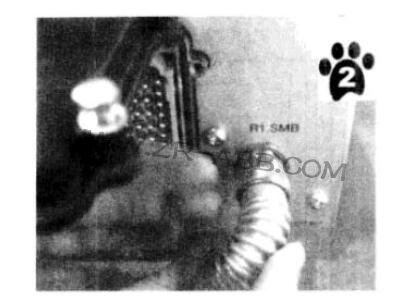
转数计数器电缆连接到控制柜接口

电动机动力电缆连接到机器人本体底座接口。
电动机动力电缆连接到控制柜接口。

用户电缆连接到机器人本体底座接口。

用户电缆连接到控制柜接口。
在控制柜门内侧,贴有一张主电源连接指引。ABB机器人使用380V三相四线制。
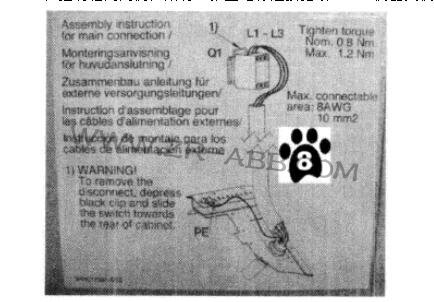
主电源电缆从此接口接入。
主电源接地点PE
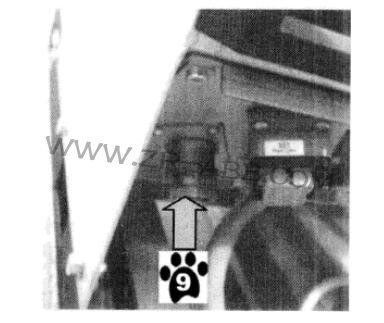
主电源开关,接入380V三相电线。

控制柜接口和本体底座接口全部连接完成。

在检查主电源输入正常以后,合上控制柜上的主电源开关,开始进行调试工作。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB驱动模块维修 >
首页 > ABB驱动模块维修 > 


