简介:定义工具坐标系的步骤 1. 点击ABB,打开主菜单 2. 点击程序数据进入程序数据窗口 3. 在程序数据窗口中选择Tooldata,进入工具坐标数据窗口 5. 可根据需要修改名称,然后点击确定 6. 双击所选的tooldata,直接进入当前工具编辑窗口 7. 编辑tooldata的参数 mas……
定义工具坐标系的步骤
1. 点击"ABB",打开主菜单
2. 点击“程序数据”进入程序数据窗口

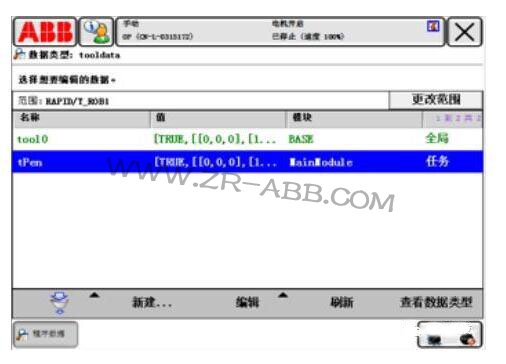
3. 在程序数据窗口中选择“Tooldata”,进入工具坐标数据窗口

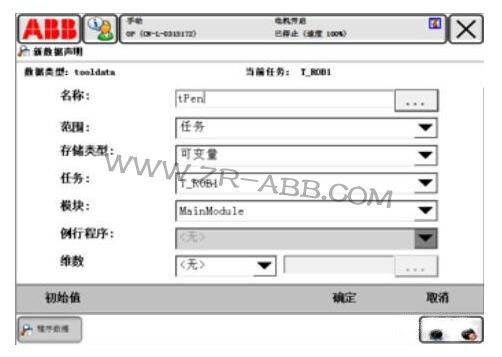
5. 可根据需要修改名称,然后点击“确定”

6. 双击所选的tooldata,直接进入当前工具编辑窗口
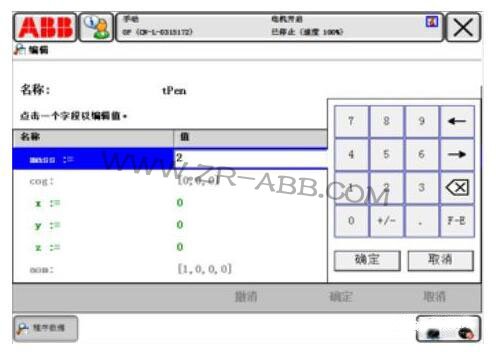
7. 编辑tooldata的参数
mass:工具重量,Kg
cog:x y z工具位置,mm
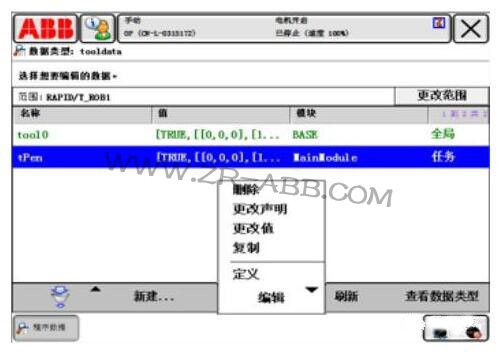
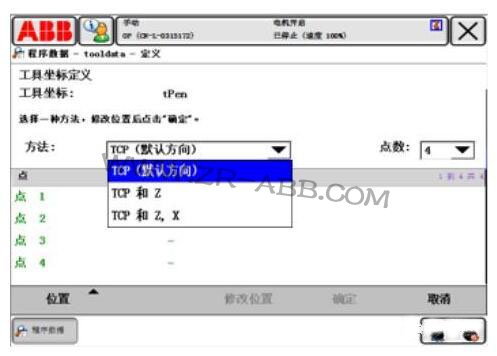
8. 选择新定义tooldata后,在功能键上选择“编辑”,在弹出菜单中选择“定义”
9. 点击下拉菜单,选择定义方法和点数
10. 手动操纵机器人,使TCP点和定点相碰,使用功能键“修改位置”记录机器人相应位置,最后用“确定”键确认
11. 手动操纵机器人,使TCP点和定点相碰,使用“重定位运动(姿态运动)”模式来检验工具坐标标定

文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB机器人维修 >
首页 > ABB机器人维修 > 

