简介:需将三轴齿轮箱内的润滑油清空,并将上臂和下臂分开。使用专用工具拆下3轴的减速机,并准备好新的齿轮箱进行安装。在安装新的齿轮箱时,需使用导向杆进行导向,并使用扭矩扳手按照规定的扭矩值锁紧螺栓。完成齿轮箱的安装后,需重新连接本体电缆,并拆除吊装……
工作任务概述:对指定的IRB 6700-300/2.70机器人进行3轴减速机的更换的工作。
更换三轴齿轮箱的关键步骤及注意事项:
在开始进行
ABB机器人维修前,需根据现场的实际情况,制定详细的吊装方案。这包括确认
工业机器人上方是否存在可用的吊装点,若不存在,则需考虑使用移动三脚架、吊车或其他吊装设备来辅助完成吊装作业。
在更换ABB机器人减速机前的准备工作方面,需做到以下几点:
断电与锁定措施:确保机器人系统已经完全断电,并使用专用的安全锁或其他锁定装置来固定电源,以防止因误操作而导致的意外启动。
工具与材料准备:根据作业需求,提前准备好所需的工具,如吊带、吊环、扭矩扳手、导向杆、扭矩扳手披头(规格包括14mm、10mm等)以及常用的维修工具。还需准备好清洁机器人安装面的清洁剂或酒精等材料。
工作区域清理:对机器人周围的工作区域进行彻底的清理,确保没有杂物或障碍物干扰作业过程。
人员培训与安全教育:操作人员需对ABB IRB6700机器人的结构、工作原理以及减速机的安装和拆卸步骤有深入的了解。还需接受相关的安全教育,确保在作业过程中能够严格遵守安全操作规程。
在吊带捆绑方面,需特别注意保持上臂的平衡,确保没有倾斜或重心偏移的情况出现。
将机器人移动至合适的位置,使上臂保持水平状态,并确保机器人6轴的法兰基本垂直于地面。按照规定的程序对机器人进行断电处理,并断开相关的外围设备(如气源、水源等)的能源供应。
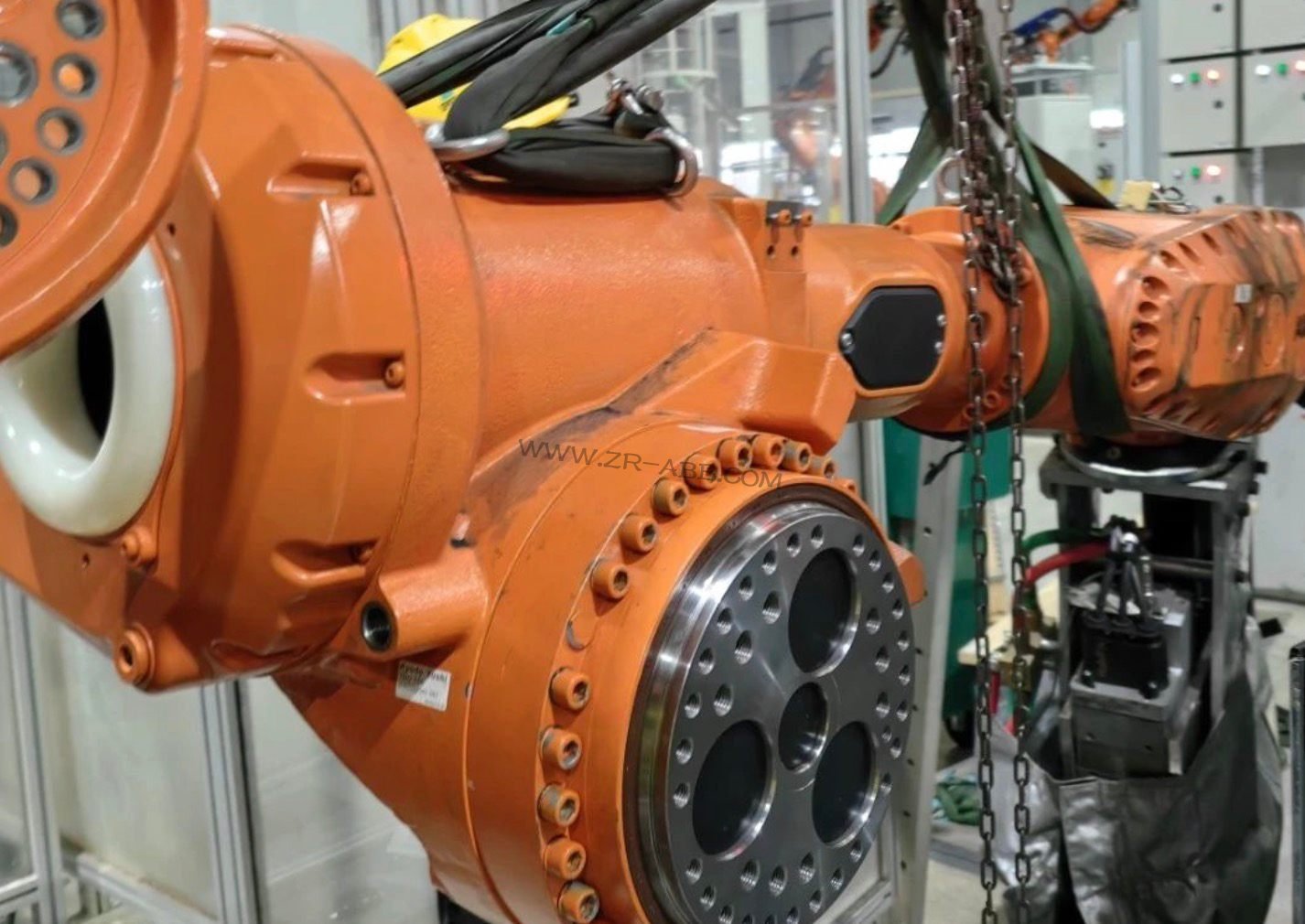
接下来,拆除机器人3-6轴的本体电缆,并在上臂上安装吊带,做好吊装准备工作。吊装时需按照预定的吊装方案进行操作,确保吊装过程的安全和顺利。
在吊装完成后,需将三轴齿轮箱内的润滑油清空,并将上臂和下臂分开。使用专用工具拆下3轴的减速机,并准备好新的齿轮箱进行安装。在安装新的齿轮箱时,需使用导向杆进行导向,并使用扭矩扳手按照规定的扭矩值锁紧螺栓。
完成齿轮箱的安装后,需重新连接本体电缆,并拆除吊装设备。对机器人进行上电处理,并使用清洁剂或酒精清洁机器人上与减速机接触的安装面,确保无油污、灰尘等杂质残留。还需对三轴齿轮箱加注适量的润滑油,并进行微校准操作。
在完成减速机的安装和调试后,需重新接通电源进行通电测试。观察机器人的运行状态是否平稳,有无异常噪音或振动等异常情况出现。通过运行预设的程序或任务来验证机器人的各项功能是否正常工作,以及是否存在异响、机器人报警等故障现象。
综上所述,通过以上步骤的精心操作和细致调试,可以成功地完成ABB IRB6700机器人减速机的更换作业。在作业过程中需始终保持高度的警惕性和责任感,确保操作的准确性和安全性。还需对机器人的性能进行全面的检测和调试工作,以确保其能够恢复正常运行并满足生产需求。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB机器人维修 >
首页 > ABB机器人维修 >