
添加微信帮助解决机器人故障

 首页 > ABB机器人维修 >
首页 > ABB机器人维修 > 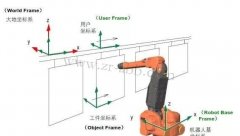
大家对ABB工业机器人的坐标系已经很是了解了。 本文简单介绍一下ABB喷涂机器人的坐标系的介绍及其配置方法。 ABB喷涂机器人坐标系,基本和工业机器人一样。 大地坐标 World Frame: 其他坐标参考的全局基准,是系统中的自定义位置和方向。 输入机器人基框架 ... [全文]

一、旋转关节 本节描述如何上紧机械手或控制器上的旋转接头这些旋转部位的说明和扭矩值只适用于金属部件,不适用于软的易碎的材料 该说明只适用于标准的旋转接头 UNBRAKOUNBRAKO是一种由ABB推荐的特殊的螺钉,表面经过特殊处理,很耐用 在用到这种螺钉的地方 ... [全文]

1.2 有危险的安全 1.2.1 钳子的安全 1.2.2 工具/工作件的安全 见用户安全指南 1.2.3 气动/液压系统的安全 见用户安全指南 1.2.4 ABB机器人维修操作中的一些危险 见用户安全指南 1.2.5 安装及ABB机器人维护过程中的危险 见用户安全指南 1.2.6 电气元件的危险 ... [全文]

一、IRB5400机器人本体保养: 1.检查ABB机器人IRB5400动力电缆与通讯电缆。 2.检查ABB机器人IRB5400各轴运动状况。 3.检查ABB机器人各轴密封。 4.IRB5400机器人本体保养,检查机器人零位。 5.检查机器人标定数据。 6.检查机器人电池。(大于7. 2V) 7.检查ABB ... [全文]

ABB机器人IRB4600的故障问题 1:无LED灯指示:或熄灭,系统无法正常启动。 2:控制器死机:机器控制器完全或者间歇的死机,无指示灯亮起且不能操作:原因:主保险丝可能已断开,控制器之间的连接缺失,控制器未连接电源,变压器出线故障或未连接。 3:控制器 ... [全文]

工业机器人定期保养的重要性: ABB机器人定期的保养是机器人正常运转所必需的,同时也确定机器人在作业时设备与工作人员的安生。 工业机器人动作3000-5000小时(约1年)需要进行一次全面系统保养,检查机器人控制林忆莲和本体是否异常,发再异常应及时处理, ... [全文]

点焊机应用广泛,但点焊机有时候也会出现故障,而使用户不能正常生产。影响用户的生产进度,下面介绍一下焊机常规的故障维修和保养,让用户在第一时间能解决故障,为高效的生产提供便利!. 1、点焊机踏下脚踏板焊机不工作,电源指示灯不亮: (1)查抄电源电压 ... [全文]

工业机器人焊机作为焊接机器人工作站中焊接系统的一部分,在整个焊接过程中,为焊接提供一定特性的电源的电器,焊接由于灵活简单方便牢固可靠,焊接后甚至与母材同等强度的优点广泛用于各个工业领域,如航空航天,船舶,汽车,机械制造等。广州子锐机器人技 ... [全文]
1.ClkReset复位一个用来计时的时钟 用途: ClkReset用来复位一个用来计时的停止监视功能的时钟。该指令在使用时钟指令之前使用,用来确保它归零。 基本范例: 该指令的基本范例说明如下。 例1 CleReset Clock1; 时钟Clock1 被复位。 项目: ClkReset Clock ... [全文]

1.焊接缺陷分析及机器人维修 机器人焊接采用的是富氩混合气体保护焊,焊接过程中出现的焊接缺陷一般有焊偏、咬边、气孔等几种,具体分析如下: (1)出现焊偏可能为焊接的位置不正确或焊枪寻找时出现问题。这时,要考虑TCP(焊枪中心点位置)是否准确,并加 ... [全文]

ABB机械手IRB 4400机身紧凑、动作迅捷的通用工业机器人 IRB 4400工业机器人机身紧凑、运行速度极快,适用于大中型重物搬运。其独有的多功能设计广泛适应各种制造业需求。该型机器人在高速运行状态下的荷重能力达60 kg ,通常一次可搬运两件物料。此外,该机 ... [全文]

ABB IRB 6620LX 直线轴工业机器人 ABB IRB 6620LX搬运机器人/工业机械手维修,ABB IRB 6620LX机器人融合了直线轴机器人和多关节型机器人的各种优点,是一款载荷150kg 的6 轴机器人,并具有ABB 多关节型机器人的高运动范围和内在柔韧性特点。ABB IRB 6620LX机 ... [全文]


