ABB机器人维修程序指令运行
时间:2018-02-05 浏览量:
简介:ABB机器人维修程序指令运行 测试 1. 手动减速状态/编程窗口/File/Check Program 检查......
1. 手动减速状态/编程窗口/File/Check Program
检查程序语法
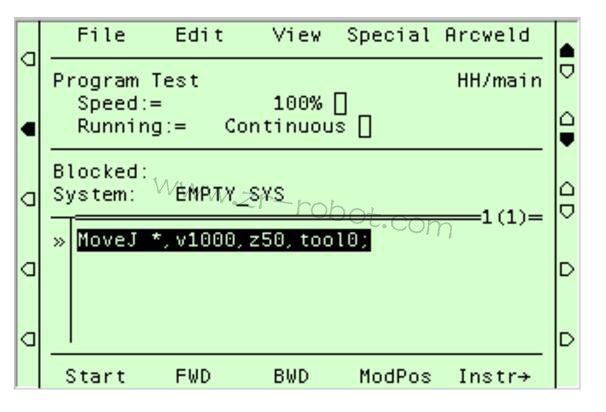
2. 编程窗口/Test
切换至程序测试窗口
Start 启动程序,机器人按程序指令运行。
FWD 机器人按程序指令顺序向前运行一个指令。
通过程序指针与光标确定当前指令行。
BWD 机器人按程序指令顺序向后运行一个指令。
通过程序指针与光标确定当前指令行。
Modpos 修正机器人运行位置。
Instr> 切换至指令窗口。
3. 选择运行模式:在测试窗口按切换键。
Cont 连续运行,程序执行完毕,自动循环执行。
Cycle 单次运行,程序执行完毕,自动停止。
4. 选择运行速度:
100%为程序内定速度或250 mm/s。
-%、+%在1%至5%之间以1%递增或递减。
-%、+%在5%至100%之间以5%递增或递减。
运行速度调整可在程序运行时同步进行。
在焊接中,只改变空行程速度,焊接速度不变。
5. 按Special/Move……/选择程序测试起点
PP “》”指针(待执行指令)
Course 光标(黑色背景部分
6. 电机上电(Enable)/FWD 或Start 开始程序测试。
可选择Special/simulate/add 进行电机断电方式测试(机器人不动)
机器人将按程序运行,注意安全。
7. 修正工作点。
将光标移动到需要修正的工作点上按 Modpos 键修正工作点。
注意操作窗口所选的Tool及Wobj必须与工作点所在的指令行一致。
8. 删除一个指令行
将光标移至所要删除的指令行/按删除键/用OK确认。
9. 增加一个指令行
按Instr>键进入指令窗口/选择指令/被选择的指令生成在光标所指指令行的下一行。如果光标在程序第一行会出现一个提示窗口选择新指令生成在程序第一行或下一行,用OK确认。
10. 运行正确,按S-Stop键停止测试。
输入与输出
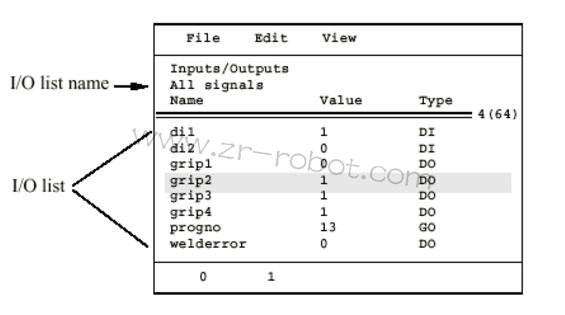
输入输出窗口:
在输入输出窗口或编程窗口不能更改或定义输入输出信号,所有操作只能在系统参数中进行。
窗口显示所有用户信号,对DO信号可以手动用功能键赋值1或0。
当手动赋值时,与机器人配合的外围设备可能运动,注意安全!
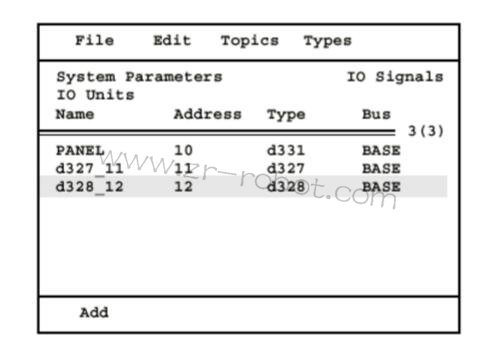
定义I/O信号板:
1. 其他窗口/System Parameters/回车/
2. Topics/IO Signals/回车/Type/IO Boards/
3. 用Add键定义新IO板或用删除键删除/File/Restart
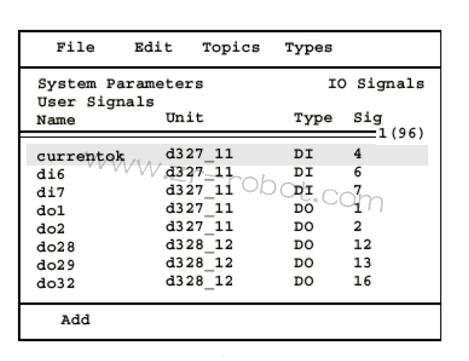
定义或更改用户信号:
1. 其他窗口/System Parameters/回车/
2. Topics/IO Signals/回车/
3. Type/IO Boards/将光标移至所需输入输出板/回车/
4. 用Add增加用户信号/用删除键删除用户信号/
5. 将光标移至所选信号/回车/可以更改信号数据(定义信号名等)/